ISBN 978 662 69291 2 Auflage 2 Book Springer Spektrum
ISBN 978 662 69292 9 Auflage 2 eBook
www.mathematik-sehen-und-verstehen.de
https://masuv.web.leuphana.de (Sicherer Zugang)
Dieter Riebesehl
| Höhere Mathematik sehen und verstehen
ISBN 978 662 69291 2 Auflage 2 Book Springer Spektrum ISBN 978 662 69292 9 Auflage 2 eBook www.mathematik-sehen-und-verstehen.de https://masuv.web.leuphana.de (Sicherer Zugang) |
Dörte Haftendorn Dieter Riebesehl |
| Kapitel 2 Lineare Algebra | |||||||||||||||||||||
|
|||||||||||||||||||||
| Abschnitt 2.1.1 Seite 135 1. Auflage: 2.1.1.1 Seite 131 |
|
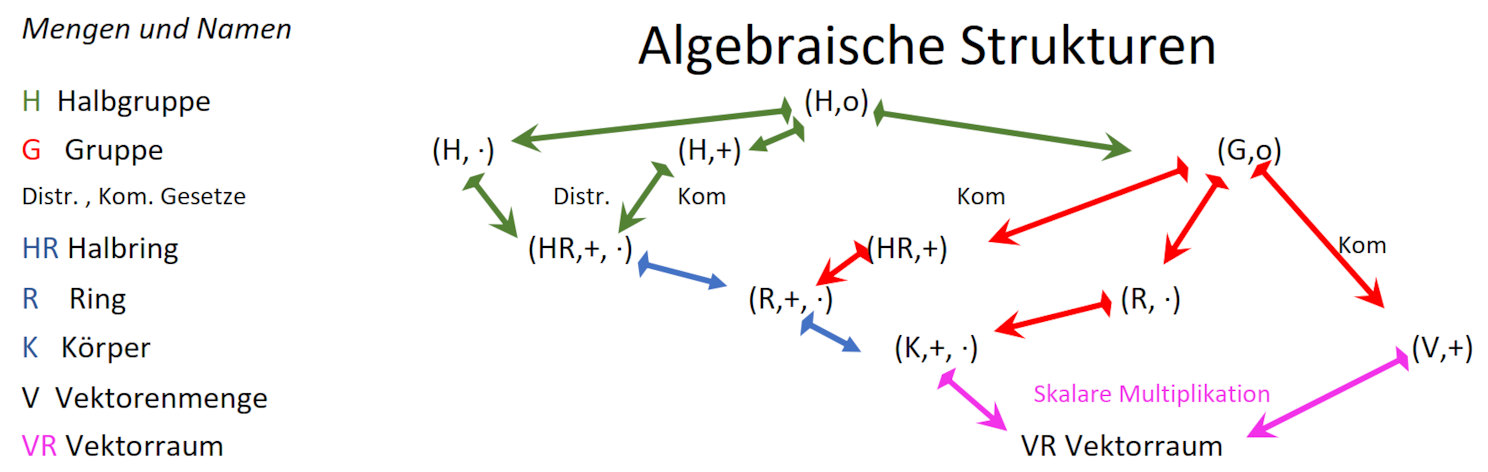
Abb. 2.1 Algebraische Strukturen und ihr Aufbau
aus Halbgruppen und Gruppen, Halbringen, Ringen und Körpern. Lesehilfe oben
im Text. In Violett ist schon der Weg zum Vektorraum aufgenommen. Lesehilfe: Vektoren bilden eine kommutative Gruppe \((V,+)\), und die skalare Multiplikation koppelt sie mit einem Körper \((K,+,\cdot)\). Diese Struktur heißt (Vektorraum \(V,+,\cdot)\) über einem Körper \((K,+,\cdot)\). |
||||||||
| Abschnitt 2.1.3.1 Seite 137 1. Auflage: Seite 133 |

Anmerkung: Für das Buch haben wir die Vektoren mit Pfeil und als Formeln geschrieben. GeoGebra selbst tut das nicht. Dafür haben Sie in dieser Datei aber Gelegenheit die beiden Vektoren \(\vec u\) und \(\vec v\) zu verändern, wobei sich diese Beschriftungen mit bewegen. Das führt Ihnen eindrucksvoll die Vektorraumaxiome vor Augen. |
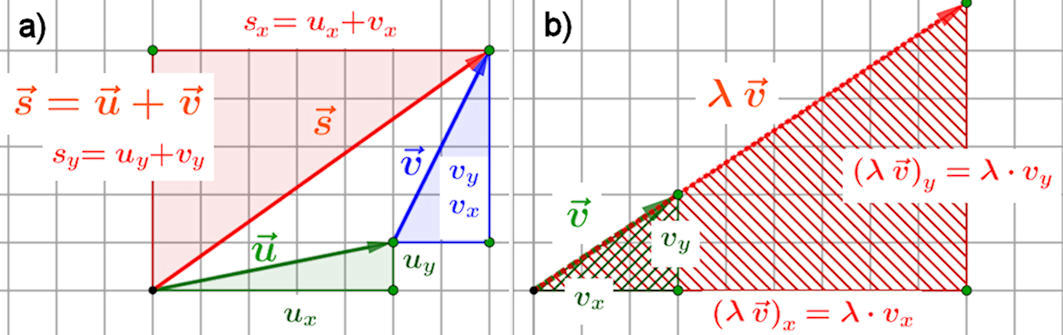
Abb. 2.2 Gruppenaxiome für \((V,+)\).
a) Man darf \(\vec v\) in passender Lage wählen.
Hängt man \(\vec v\) hinter \(
\vec u\), erhält man \(\vec u + \vec v\). b) Das Parallelogramm zeigt,
dass die Addition kommutativ ist. c) Die Differenz
\(\vec u-\vec v\) erhält man bei gemeinsamem Start von \(\vec u\) und \(\vec v\)
als Vektor von der Spitze von \(\vec v\) zur Spitze von \(\vec u.\) Gestrichelt
ist auch die Definition der Differenz gezeigt. d) Die Addition ist
assoziativ, es ist egal, ob die Klammer vorn oder hinten ist, man
braucht sie daher nicht zu schreiben. Dieses Bild kann man auch räumlich
sehen, wenn sich z.B. \(\vec w\) aus der Ebene von \(\vec u\) und \(\vec v\)
erhebt. Alle Gruppenaxiome sind in \(\mathbb R^2\) und \(\mathbb R^3\) erfüllt.
|
||||||||
| Abschnitt 2.1.3.1 Seite 138 1. Auflage: Seite 134 |

|
Abb. 2.3 Axiome für die skalare
Multiplikation
für \((V,+)\). a) Man kann mit jedem
reellen Faktor \(\lambda\) strecken, hier ist \(\lambda=3\). Ein negatives \(
\lambda\) bewirkt eine Umkehr in die Gegenrichtung. b) Das erste
Distributivgesetz
ist sehr naheliegend, man kann die Vielfachen von \(\vec v\)
beliebig aufteilen. c) Das zweite Distributivgesetz ist eine
vektorielle Version des zweiten Strahlensatzes.
|
||||||||
| Abschnitt 2.1.3.3 Seite 140 1. Auflage: Seite 136 |
|
Abb. 2.4 Legende Vektorpfeile und
\(n\)-Tupel. a) Die Addition der Komponenten passt zur Summe der
Vektorpfeile. b) Die Streckung der Komponenten passt zur Streckung
des Vektorpfeils (Strahlensatz).
|
||||||||
| Abschnitt 2.1.6.1 Seite 147 1. Auflage: Seite 143 |
|
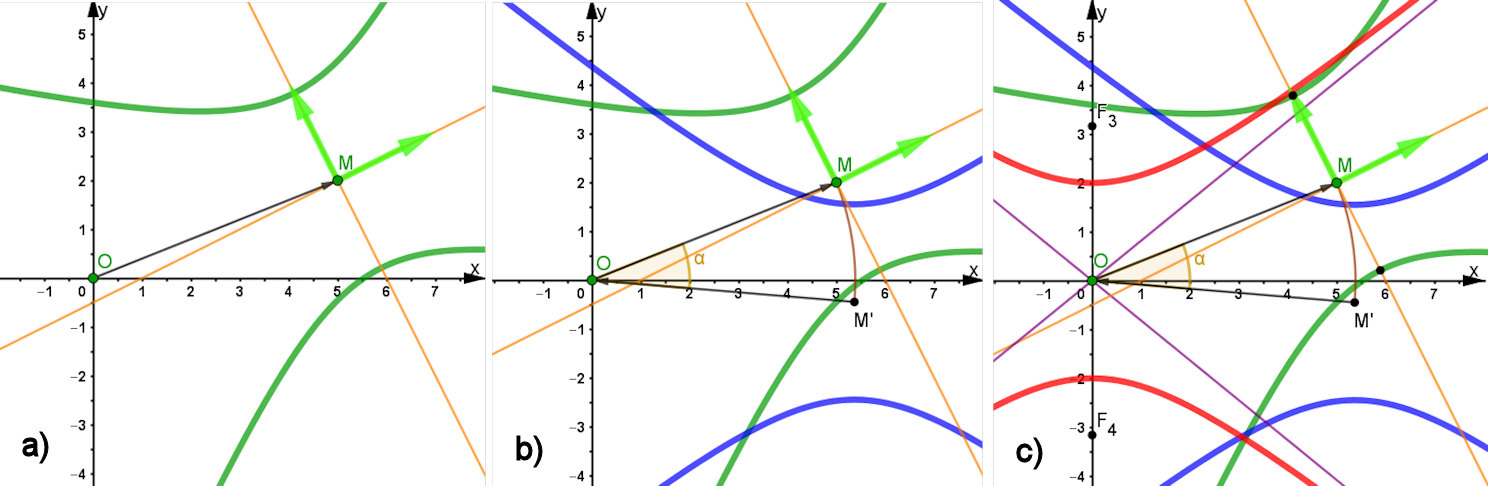
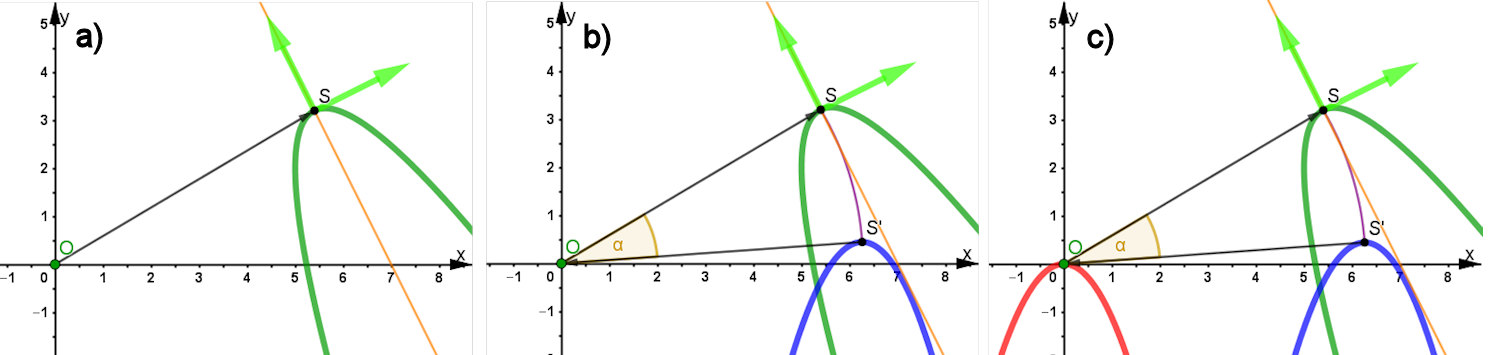
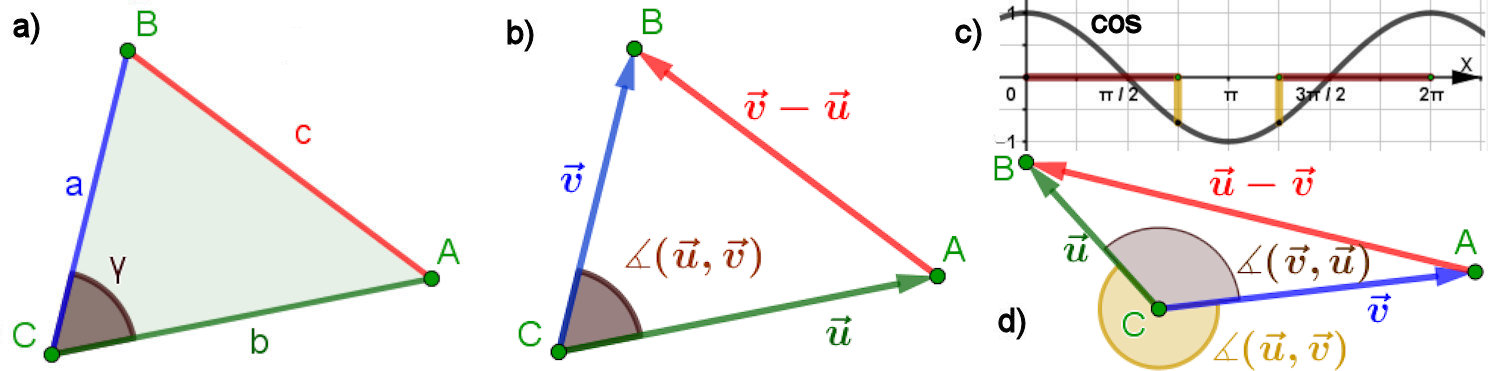
Abb. 2.5 Cosinussatz und seine Wirkung. a)
zeigt ein Dreieck, für das die rote
Seite \(c\) mit dem Cosinussatz berechnet werden kann. b) zeigt das
Dreieck in der vektoriellen Auffassung, in der der rote Vektor als Differenz
\(\vec{u}-\vec{v}\) zu deuten ist. d) bezieht sich auf den Fall, dass
der von \(\vec{u}\) und \(\vec{v}\) eingeschlossene Winkel, also \(\angle(\vec{u},
\vec{v})\), den man standardmäßig in mathematisch positivem Sinn misst,
überstumpf wird. c) begründet, warum dies keine Wirkung auf das
Skalarprodukt hat.
|
||||||||
| Abschnitt 2.1.6.1 Seite 148 1. Auflage: Seite 144 |
|
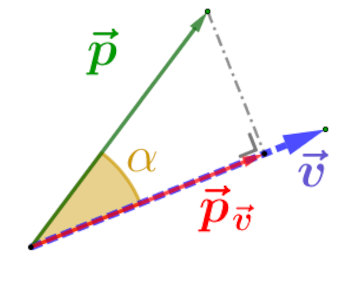
Abb. 2.6 Die Projektion von \(\vec{p}\)
auf \(\vec{v}\)
ist \(\vec{p}_{\vec{v}}=\frac{\langle \vec{p},\vec{v}\,\rangle} {\langle \vec{v},\vec{v}\,\rangle} \,\vec{v}\) Beweis: Elementargeometrisch gilt \(||\vec p_{\vec v}||=||\vec p||\cos\alpha\) \[ \vec p_{\vec v}=||\vec p_{\vec v}||\frac{\vec v}{||\vec v||} =\frac{||\vec p_{\vec v}||\,||\vec v||}{||\vec v||^2}\vec v =\frac{||\vec p||\,||\vec v||\,\cos\alpha}{||\vec v||^2}\vec v =\frac{\langle \vec p,\vec v\,\rangle}{\langle \vec v,\vec v\,\rangle} \vec v \] Bildet man für das letzte Gleichheitszeichen dieser Gleichungskette auf bedien Seiten das Skalarprodunkt mit \( \vec{v}\), so erhält man \( \frac{||\vec p||\,||\vec v||\,\cos\alpha}{||\vec v||^2}\langle \vec v, \vec v \rangle = \langle \vec p,\vec v\,\rangle\) und dann wegen \( \langle \vec v, \vec v \rangle=||\vec v||^2)\) schließlich \[\langle \vec p,\vec v\,\rangle=||\vec p||\,||\vec v||\,\cos\alpha.\] |
||||||||
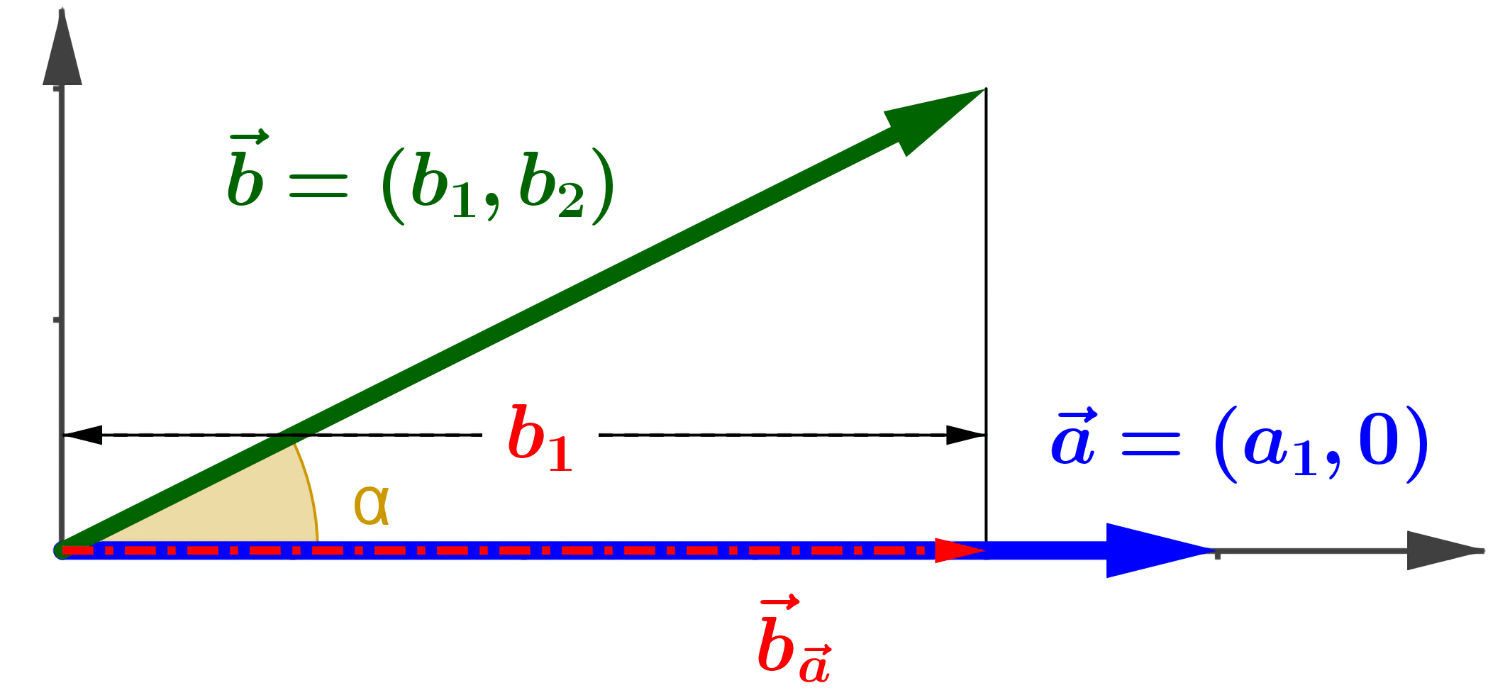 |
Erstaunlicherweise benutzt die Formel aus Satz 2.2 für das
Skalarprodukt nur Addition und Multiplikation,
die andere aber den Cosinus, eine transzendente
Funktion, und in der Längenbestimmung eine Quadratwurzel. Wie kann man das erklären?
Der erste Beweis im Buch Seite 146 nutzt den Cosinussatz im Dreieck, der ja nicht gerade
direkt einsichtig ist. Liegen die beiden Vektoren in spezieller Lage, nämlich \(\vec a = (a_1,0)\) auf der x-Achse wie im nebenstehenden Bild, dann kann man die Gleichheit der beiden Formeln sofort einsehen: \[\langle\vec a,\vec b\rangle = a_1b_1 + 0\cdot b_2=a_1b_1= ||\vec a||\cdot||\vec b||\cdot\frac{b_1}{||\vec b||} = ||\vec a||\cdot||\vec b||\cos\varphi\] mit dem eingeschlossenen Winkel \(\varphi\). Hier wurde nur die Definition des Cosinus als das Verhältnis zweier Seiten im rechtwinkligen Dreieck benutzt, und die Gleichheit der beiden Formeln ist nicht mehr geheimnisvoll. Dies funktioniert auch in höheren Dimensionen, wenn die beiden Vektoren in der xy-Ebene so liegen. Zwei Vektoren können immer durch eine (höherdimensionale) Drehung in diese Lage gebracht werden. Eine solche Drehung erhält das Skalarprodukt sowie Vektorlängen und Winkel. Das kann man leicht nachrechnen, denn die Drehung wird durch eine orthonormale Matrix \(A\) vermittelt, also mit \(A^\top A=E\), und dann ist \[\langle\vec a,\vec b\rangle = \vec a^\top\cdot\vec b = \vec a^\top\cdot E\cdot\vec b = \vec a^\top\cdot A^\top A\cdot\vec b = \vec a^\top A^\top\cdot A\,\vec b = \langle A\,\vec a,A\,\vec b\rangle.\] Deshalb gilt die Gleichheit der beiden Formeln auch allgemein. |
|||||||||
| Abschnitt 2.1.6.2 Seite 148 1. Auflage: Seite 144 |

|
Abb. 2.7 Motivation des Skalarproduktes in
Funktionenräumen. a) Vektoren aus den Wertetabellen,
\(f\) grün in y-Richtung, \(g\) blau in z-Richtung, b) Rechtecke
für die Produkte an den \(x\)-Stellen, c) gewichtete Produkte als Quadervolumina,
d) das Integral
als Grenzwert ist ein sinnvolles
Skalarprodukt von \(f\) und \(g\).
|
||||||||
| Abschnitt 2.1.7.2 Seite 152 1. Auflage: Seite 148 |
|
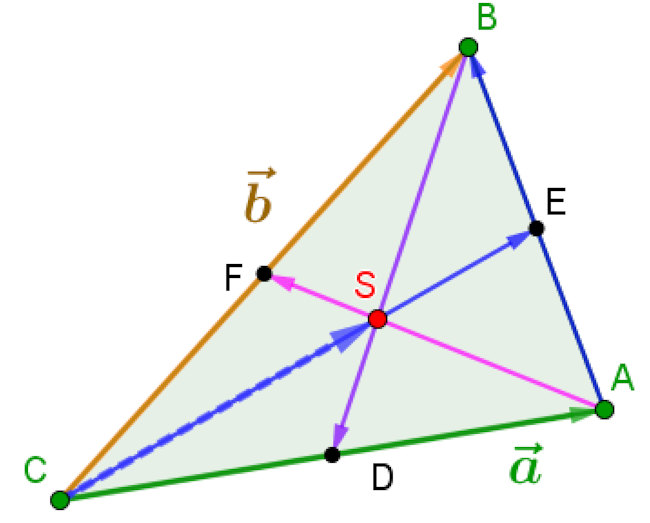
Abb. 2.8 Schwerpunkt im Dreieck. Ein Dreieck wird aufgespannt von zwei linear unabhängigen Vektoren \(\vec{a}\) und \(\vec{b}\). Ziel ist es zunächst, mit ihnen auf zwei verschiedenen Wegen ohne Verwendung von \(\overrightarrow{BD}\) von \(C\) zum Punkt \(S\) zu gelangen. Weg 1: \(\overrightarrow{CS}= t(\overrightarrow{CE})=t \cdot(\vec{a}+\frac{1}{2}(\vec{b}-\vec{a}))\) \(=\frac{t}{2}\cdot(\vec{a}+ \vec{b})\) Weg 2: \(\overrightarrow{CS}=\vec a+r\overrightarrow{AF}= \vec a+r(\frac{1}{2}\vec b-\vec a)\) mit \(t,r\in\mathbb R\). Zusammen und sortiert und \((\cdot 2)\) entsteht die Gleichung \((2-2r-t)\cdot\vec{a}=(t-r)\cdot\vec{b}\). Da \(\vec{a}\) und \(\vec{b}\) linear unabhängig sind, folgt das Gleichungssystem \(2-2r-t=0\) und \(t-r=0\). Dies ist eine typische "Teilverhältnisaufgabe". Solche sind um Gymasium etabliert, denn sie nutzen die Begriffe Basis und lineare Unabhängigkeit in überzeugender Weise zur Lösung aus. |
||||||||
| Abschnitt 2.2.1 Seite 153 1. Auflage: Seite 149 |
|
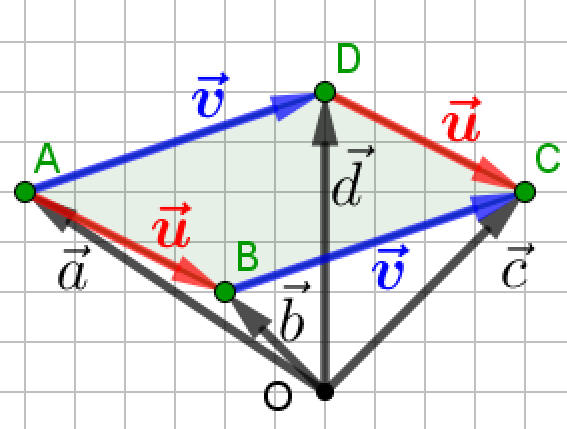
Abb. 2.9 Ortsvektoren (schwarz) versus
Vektoren. \(\vec{u}\) (rot), \(\vec{v}\) (blau). Für das Parallelogramm aus den Punkten \(A,\,B,\,C\) und \(D\) gilt \( \vec{u}{:=}\vec{b}{-}\vec{a}{=}\vec{c}{-}\vec{d}\) und \(\vec{v}{:=}\vec{c}{-}\vec{b}{=} \vec{d}{-}\vec{a}\). Die Ortsvektoren bilden den Punktraum \(\mathbb R^m\). Durch die komponentenweise Differenz von Punkten entstehen als Pfeilklassen die Vektoren des Vektorraumes \(\mathbb R^m\). Mit Ortsvektoren rechnet man wie mit allen Vektoren. Im Kontext kann man eigentlich immer Ortsvektoren und verschiebliche Vektoren auseinanderhalten. |
||||||||
| Abschnitt 2.2.1.1 Seite 153 1. Auflage: Seite 149 |
|
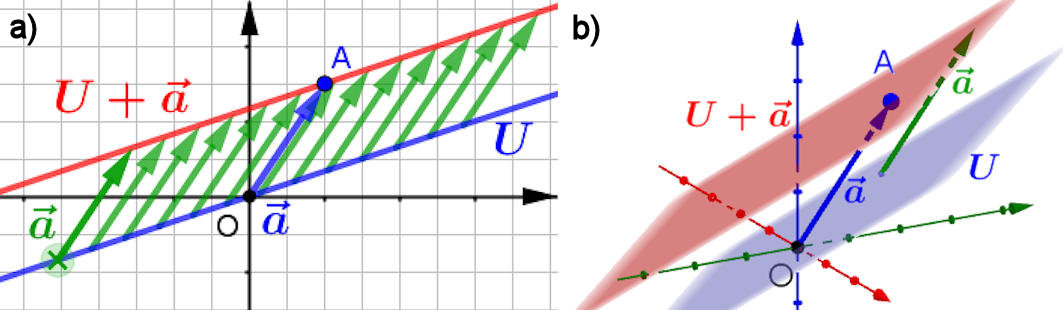
Abb. 2.10 Affine Unterräume, die Punkt \(A\) enthalten,
entstehen als Nebenklassen \(U+\vec a\)
aus Unter(vektor)räumen \(U\), die ja den Ursprung
enthalten.
\(\vec a \in U\) ist erlaubt.
|
||||||||
| Abschnitt 2.2.2.1 Seite 156 1. Auflage: 2.2.2 Seite 152 |
|
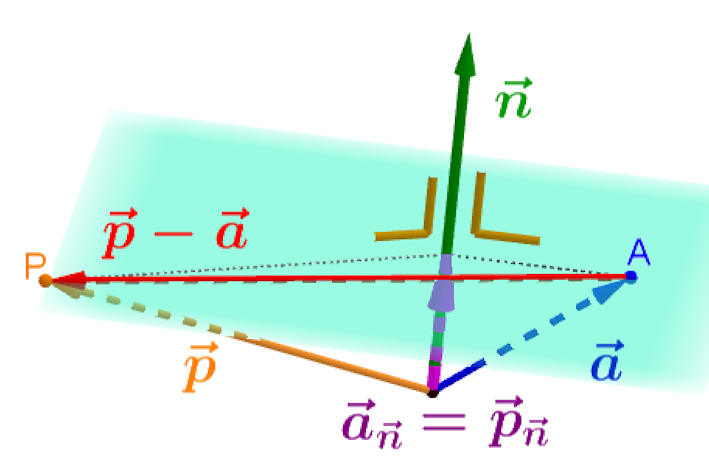
Abb. 2.11 Ebenengleichung mit Normalenvektor:
Die Ebene ist definiert durch den Aufpunkt \(A\) und \(\vec n\). Ortsvektoren sind
\(\vec{a}\) (blau) und für einen Punkt \(P\) auf
der Ebene \(\vec{p}\) (orange).
Damit ist in der Ebene der Differenzvektor \(\vec{p}-\vec{a}\) (rot) definiert.
Vektor \(\vec{n}\) (grün) ist senkrecht dazu. Ersichtlich sind die Projektionen auf
\(\vec n\) gleich:
\(\vec p_{\vec n}=\vec a_{\vec n}\), s.\,u. Nach Gleichung (pr) gilt
\(\vec{a}\cdot \vec{n}=\vec{p}\cdot \vec{n}
\Longleftrightarrow
\vec{n}\cdot\bigl( \vec{p}-\vec{a}\bigr)=0
\).
|
||||||||
| Abschnitt 2.2.3 Seite 158 1. Auflage: Seite 154 |

|
Abb. 2.12 Die Hesse'sche Normalform
der Geradengleichung: Die Gerade ist definiert durch den Aufpunkt \(A\) und
\(\vec n\)
als Lot von \(A\) auf die Normalenrichtung, die kleine
(grüne) Zacke deutet den rechten Winkel an.
Für einen beliebigen Punkt \(P\)
mit Ortsvektor \(\vec{p}\) (orange) auf der Geraden gilt durch diesen Aufbau
\(\vec{n}\cdot(\vec{p}-\vec a)=0\).
Wie in Abb. 2.11 sind die
Projektionen aller \(\vec p\) aus der Geraden und die
Projektion von \(\vec a\) auf die Normalenrichtung stets gleich.
|
||||||||
| Abschnitt 2.2.4 Seite 159 1. Auflage: Seite 155 |
|
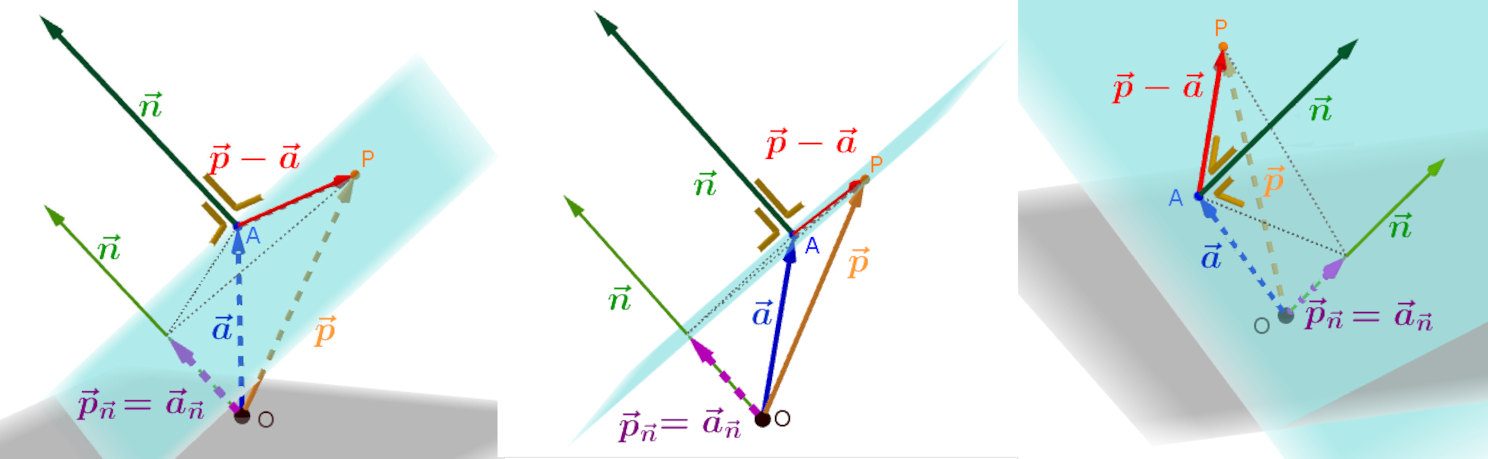
Abb. 2.13 Ebene in Hesse'scher Normalform.
Sie ist gezeigt in drei Stellungen.
Sie können die Ebene drehen. Der Aufpunkt \(A\) mit Ortsvektor
\(\vec{a}\) (blau) und Punkt \(P\) auf der Ebene mit Ortsvektor \(\vec{p}\) (orange)
definieren \(\vec{p}-\vec{a}\) (rot), darauf steht \(\vec{n}\) (grün) senkrecht.
Das mit feinen Punkten gezeigte Dreieck auf der Ebene bestätigt wieder die
Übereinstimmung der Projektionen aller Ebenenpunkte auf
den Normalenvektor.
|
||||||||
| Abschnitt 2.2.4 Seite 160 1. Auflage: 2.2.4.1 Seite 156 |
|
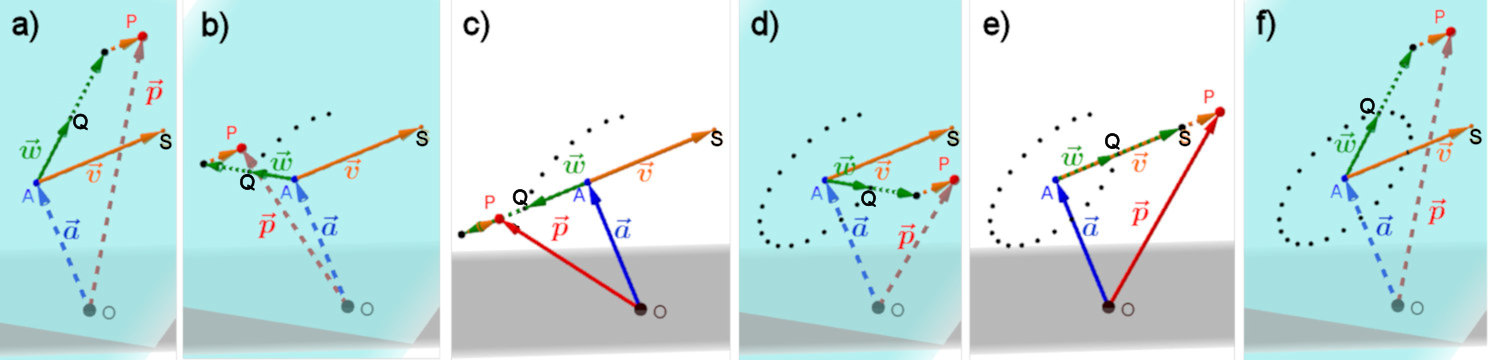
Abb. 2.14 Ebene in Parameterdarstellung.
Die Ebene, der Ortsvektor \(\vec{a}\) und der 1. Richtungsvektor \(\vec{v}\)
mit Spitze in \(S\) sind in allen Bildern dieselben. Die Spitze \(Q\) des 2.
Richtungsvektors \(\vec{w}\) wird in 24 Schritten längs einer Ellipse auf der
Ebene gedreht. In c) und e) wird keine Ebene angezeigt, weil
\(\vec{w}\) und \(\vec{v}\) parallel sind und die Ebene gar nicht definiert
ist. Als Repräsentant beliebiger Ebenenpunkte ist stets \(\vec{p}=\vec{a}+0.3
\,\vec{v}+2\,\vec{w}\) eingetragen.
|
||||||||
| Abschnitt 2.2.5 Seite 161 1. Auflage: Seite 157 |
|
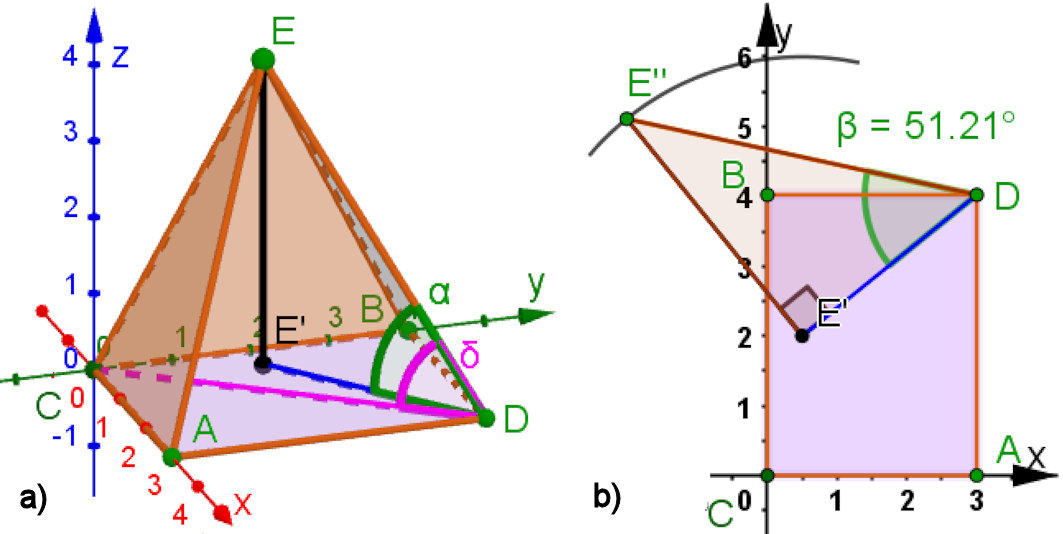
Abb. 2.15 Kirchturmspitze als Pyramide. a)
Es geht um den grünen Winkel \(\alpha\) und den violetten Winkel \(\delta\). b) zeigt den Grundriss und eine Konstruktion, die das aufrechte Dreieck \(DE'E\) in die Grundebene umklappt. Dort kann man den gesuchten Winkel \(\alpha\), unter dem Namen \(\beta\), messen. |
||||||||
| Abschnitt 2.2.5 Seite 163 1. Auflage: Seite 159 |
|
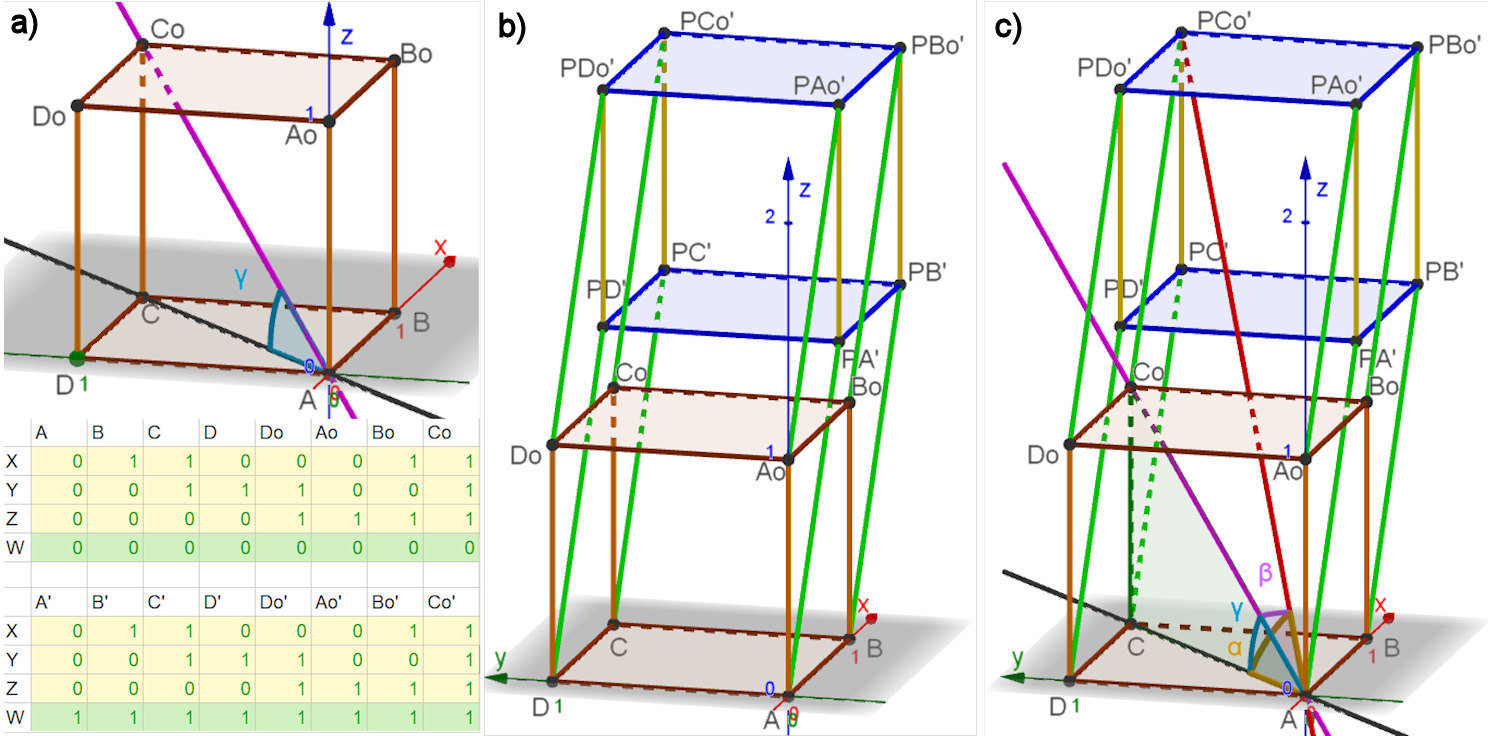
Abb. 2.16 3D- und 4D-Würfel. a) oben:
3D-Würfel mit Raumdiagonale, a) unten: definierende Punkte, gelb 3D,
mit grün 4D, b) 4D-Würfel: mit allen Ecken und Kanten, nach 3D
projiziert wie im Text beschrieben, das 3D-Bild ist dann in GeoGebra realisiert.
Es ist zum freien Drehen und auch anders Projizieren
eingerichtet. Eine weitere Version ist Abb. 2.17,
c) zeigt Diagonalen, die für die Berechnung (siehe unten)
der Winkel eingeführt sind.
|
||||||||
| Abschnitt 2.2.5 Seite 164 1. Auflage: Seite 160 |
|
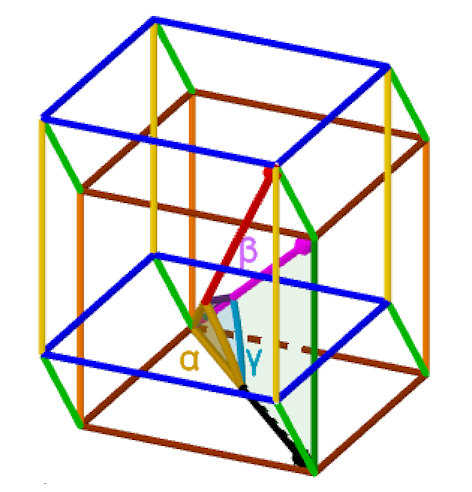
Abb. 2.17 Hyperwürfel
in anderer Projektion.
Die \(3{{\times}}4\)--Projektionsmatrix
hat in jeder Spalte das 3D-Bild eines der vier
Einheitsvektoren. Nur für das Bild von \(\vec{e}_4{=}(0,0,0,1)^{\rm T}\) konnte nicht so etwas
Einfaches gewählt werden.
Es ist mit variablen Zahlen \(\vec{e}_4\,'{=}(a,b,c)^{\rm T}\) gesetzt.
Es ist also
\(P=\left(\begin{matrix}1&0&0&a\\
0&1&0&b\\
0&0&1&c
\end{matrix}\right)\);
im Bild ist \( a=1.6,\ b=0.2,\ c=1.1\).
Der 4D-Würfel heißt auch Tesserakt, siehe Wikipedia.
|
||||||||
| Abschnitt 2.3.2 Seite 167 1. Auflage: Seite 163 |
|
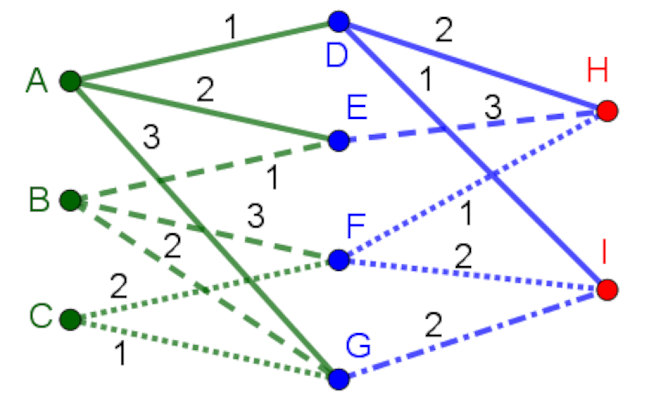
Abb. 2.18 Tägliche Reisemöglichkeiten von den Städten
zu den Häfen und dann zu den Inseln werden gezeigt durch den Übergangsgraphen
und die Matrizen:
\[L=\begin{array}{c|cccc|}
&D & E & F & G\cr
\hline
A & 1 & 2 & 0 & 3\cr
B & 0 & 1 & 3 & 2\cr
C & 0 & 0 & 2 & 1\cr
\hline
\end{array},\;
W=\begin{array}{c|cc|}
&H & I\cr
\hline
D & 2 & 1\cr
E & 3 & 0\cr
F & 1 & 2\cr
G & 0 & 2\cr
\hline
\end{array}
\]
|
||||||||
| Abschnitt 2.3.2 Seite 168 1. Auflage: Seite 164 |
|
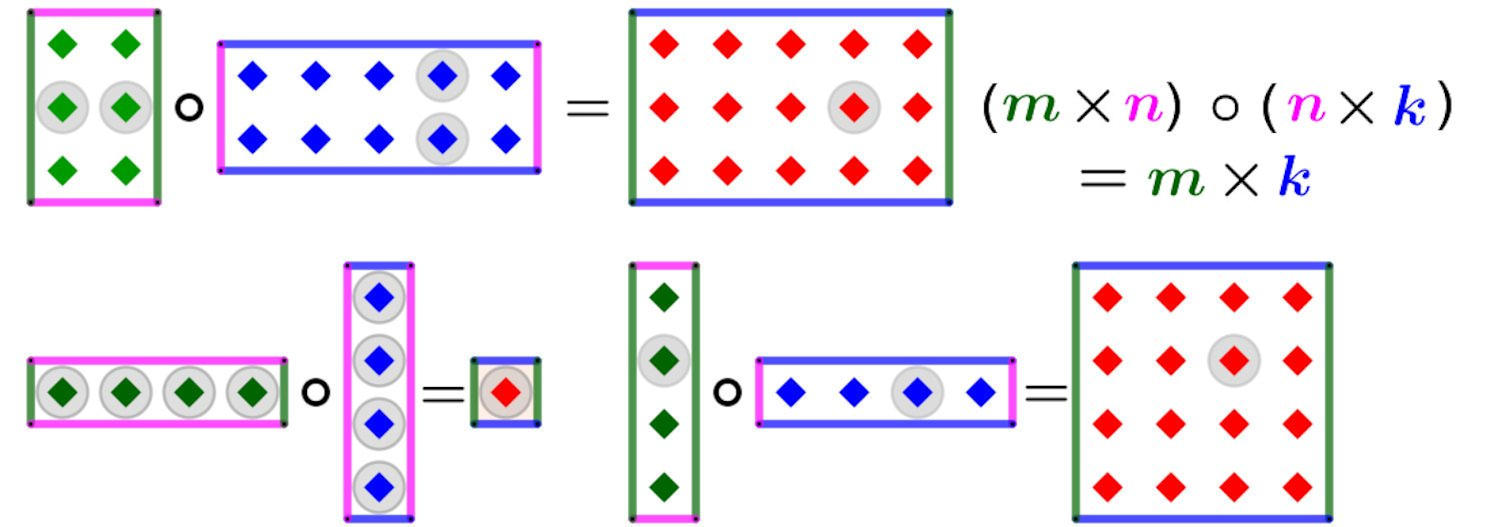
Abb. 2.19 Matrizen-Multiplikation.
Obere Reihe: Beim Produkt einer \(3{\times} 2\)-Matrix \(A\) mit einer
\(2{\times} 5\)-Matrix \(
B\) ergibt sich eine \(3{\times} 5\)-Matrix \(C\). Hervorgehoben ist: (Zeile 2)\(\cdot
\)(Spalte 4) \(=\)Element \(c_{24}\). Die Strategie ist in der Legende zu
Abb. 2.20 fett hervorgehoben. Untere Reihe: Einen \(1{\times} n\)-Zeilenvektor kann man mit einem \(n {\times}1\)-Spaltenvektor multiplizieren, es ergibt sich eine \(1{\times} 1\)-Matrix. Manchmal wird gesagt, sie sei ein Skalar. Sie wirkt aber von links nur auf Zeilenvektoren, von rechts auf Spaltenvektoren "wie" ein Skalar. Es ist auch "Spalte mal Zeile" möglich, ergibt aber eine \(n{\times} n\)-Matrix. |
||||||||
| Abschnitt 2.3.2 Seite 168 1. Auflage: Seite 164 |

|
Abb. 2.20 Matrizen-Multiplikation mit dem
Schema von Falk
möchten wir hier auch vorstellen. Für Von-Hand-Rechnungen in der
Mathematik gibt es meist mehrere Schreibstrategien, jeder bevorzugt eine "persönliche",
abhängig von Lernbiografie und kulturellem Umfeld.
Bei beiden Schreibarten ist für jede Zeile \(i\) folgendes zu tun:
Man bilde das Skalarprodukt aus Zeile
\(\vec{z}_i\) (senkrecht gedacht) mit Spalte \(\vec{s}_j\)
von \(j=1\) bis \(j=k\).
So erhält man die ganze Zeile \(i\) der Produktmatrix.
|
||||||||
| Anregung 2.1
Abschnitt 2.5.1.5 Seite 200
|
|
|||||||||
| Abschnitt 2.4.1 Seite 175 1. Auflage: Seite 170 |
|
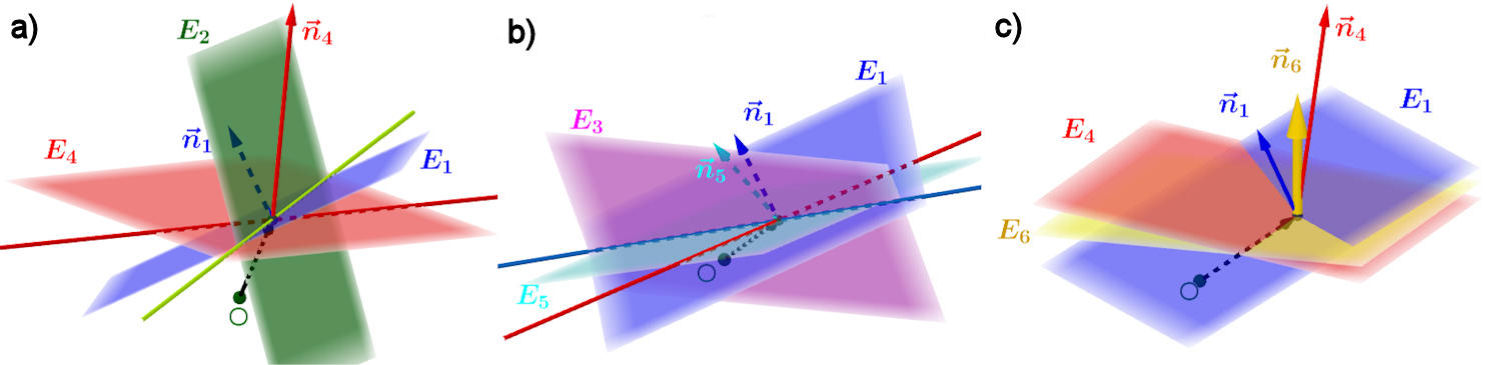
Abb. 2.21 Der Schnitt von drei Ebenen.
a) zeigt die Ebenen \(E_1\) (blau), \(E_2\) (grün), \(E_4\) (rot),
die Gerade \(E_1\cap E_2\) (hellgrün). Visualisierung der Zeilen 1, 2, 5 der
Rechnung 2.4.1.1. b) zeigt das Entsprechende für
\(E_5=E_1+E_3\) (hellblau) und die Zeilen 1, 3, 7. Weiteres und
c) im Text.
Für ist vor allem das Bild wichtig. |
||||||||
| Abschnitt 2.4.1.2 Seite 176 1. Auflage: Seite 172 |
|
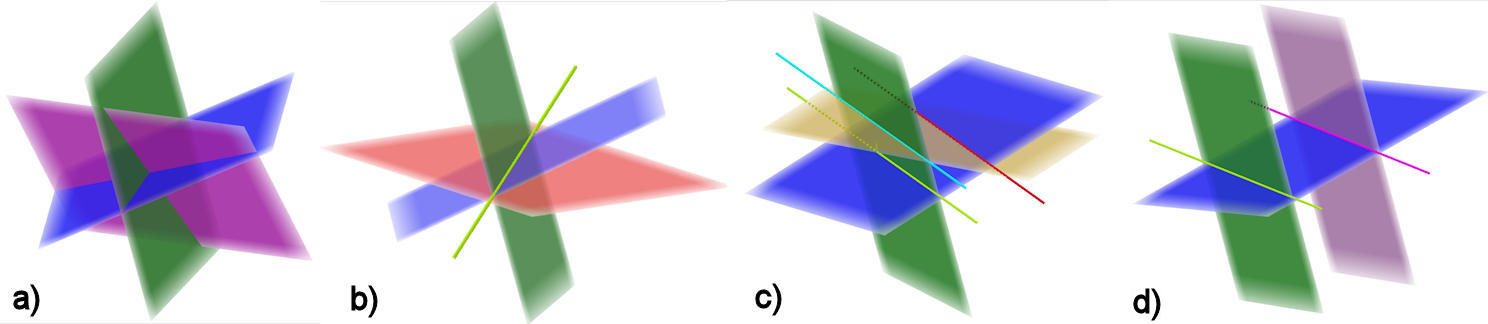
Abb. 2.22 Beim Schnitt von drei Ebenen
treten verschiedene Fälle auf. Die blaue und die grüne Ebene sind \(E_1\) und
\(E_2\) aus der obigen Rechnung und der vorigen
Abb. 2.21.
a) zeigt das Beispiel aus der Rechnung mit dem
Schnittpunkt der drei Ebenen. In b) enthält die 3. Ebene auch die
Schnittgerade der beiden ersten, so dass diese Gerade die Lösungsmenge des
Schnittproblems ist. In c) und d) schneiden sich \(E_1\) und \(E_3\) in
einer getrennt liegenden Parallelen zu der ersten Schnittgeraden. Dadurch ist
die Lösungsmenge des Schnittproblems leer.
|
||||||||
| Abschnitt 2.4.2 Seite 178 1. Auflage: Seite 173 |
|
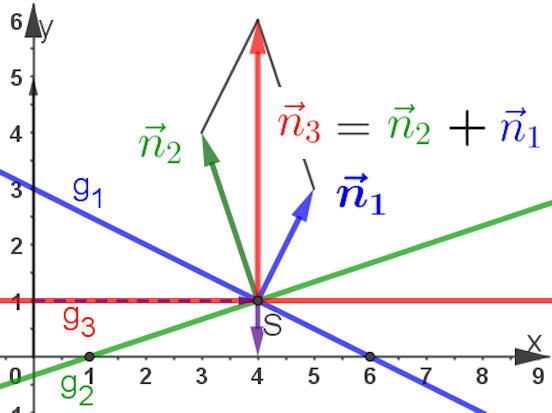
Abb. 2.23 Schnitt von zwei Geraden.
\[
\begin{array}{rrcrcrcrl}
1:&\mbox{Gerade } g_1&\quad& x&+&2y&=& 6&\mbox{blaue Gerade}\\
2:&\mbox{Gerade } g_2&\quad& -x&+&3y&=&-1&\mbox{grüne Gerade}\\
\hline
3:&g_1+g_2=g_3 &\quad& 0x&+&5y&=& 5&\mbox{waagerechte,}\\
4:&g_3' &\quad& && y&=& 1&\mbox{rote Gerade}\\
\hline
8:&Z 4\rightarrow Z 1&\quad& x&+&2&=& 6&\\
9:& &\quad& & &x&=& 4&\mbox{also } S=(4,\,1)
\end{array}
\]
|
||||||||
| Abschnitt 2.4.3 Seite 178 1. Auflage: 2.4.2 Seite 173 |
|
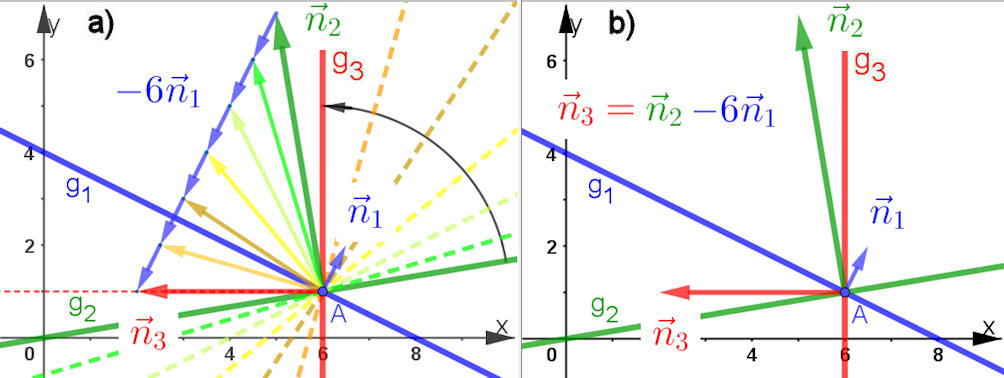
Abb. 2.24 Schnitt von zwei Geraden.
\[
\begin{array}{rrcrcr}
g_1*:& \frac{1}{2}x&+&y&=& 4\\
g_2:& -x&+&6y&=&0\\
\hline
g_3:& -4x&+&0y&=&-24\\
g_3':& x& & &=& 6\\
\hline
Z 1& 3&+& y&=& 4\\
& & & y&=& 1
\end{array}
\]
|
||||||||
| Abschnitt 2.4.3 Seite 179 1. Auflage: Seite 175 |

|
Abb. 2.25 Schematische erweiterte Matrizen
zeigen die im Satz genannten Fälle. Grüne Felder dürfen nicht die Null
enthalten, graue können beliebig gefüllt sein. 1) leere
Lösungsmenge: 1a) und 1b) zeigen andere Verteilungen der Nullen, auch hier
ist die Lösungsmenge leer, dabei zeigt 1b) eine Matrix mit Rang 3 und der Rang
der erweiterten Matrix ist 4. 2) bedeutet unendlich viele Lösungen,
Lösungsraum ist eine Gerade, bei 3) ist ein Punkt eindeutige Lösung.
Dieses Bild existiert nur als Powerpoint-Datei: GaussRangBilder.pptx |
||||||||
| Abschnitt 2.4.4 Seite 182 1. Auflage: Seite 177 |

|
Abb. 2.26 Schnittproblem für zwei
Geraden. Im homogenen LGS können nur zwei Fälle (zwei Bilder links)
vorkommen:
entweder die Geraden schneiden sich im Ursprung oder sie fallen als
Ursprungsgeraden aufeinander.
Im inhomogenen System kann es einen Schnittpunkt \(P_0\) geben, dessen
Ortsvektor beide Gleichungen erfüllt, die in \(A\vec{p}=\vec{b}\)
zusammengefasst sind. Die Geraden können aufeinander fallen,
d.h. jeder Geradenpunkt \(P_0\) erfüllt beide Gleichungen, oder die Geraden liegen
parallel und getrennt,
kein Punkt erfüllt beide Gleichungen. Außer in diesem Fall kann man sich
vorstellen, die Lösungsmenge \(\mathbb L_A\) würde aus dem Ursprung heraus an einen
geeigneten Punkt \(P_0\) verschoben.
|
||||||||
| Abschnitt 2.4.5 Seite 183 1. Auflage: Seite 178 |

|
Abb. 2.27 Determinante
einer Matrix \(A\) nach einer Spalte entwickeln, beschrieben im Text. Die
grüne \(j\)-Spalte ist fest gewählt. Die rote Zeile nimmt jede Lage \(i={1,
\dots, n}\) genau einmal an.
Die Adjunkte oder auch adjungierte Matrix
\(A_{ij}\) zu
\(a_{ij}\) entsteht dabei durch Streichung der Zeile \(i\) und der Spalte \(j\) von \(A\).
Es ist hier durch Farben gezeigt, wie die \(A_{ij}\) entstehen.
|
||||||||
| Abschnitt 2.4.5 Seite 184 1. Auflage: Seite 180 |
|
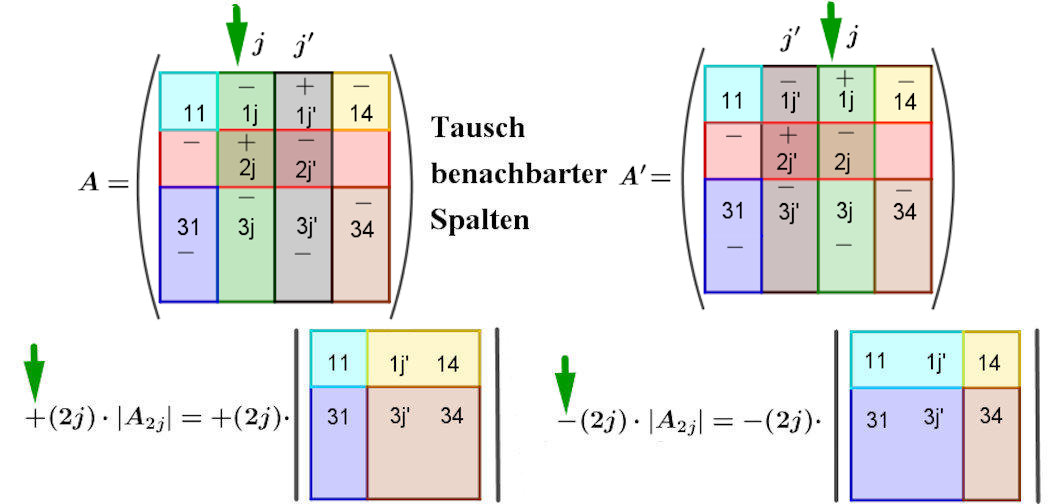
Abb. 2.28 Tausch der Spalten \(j\) und \(j'=j+1\):
Sowohl vor dem Tausch als auch nachher entwickeln wir nach der grünen Spalte
mit dem (ursprünglichen) Namen \(j\). Dabei bleiben alle Adjunkten genau wie
vorher, die Faktoren ebenso, aber deren Vorzeichen ändern sich alle.
|
||||||||
| Abschnitt 2.4.6 Seite 185 1. Auflage: Seite 180 |
|
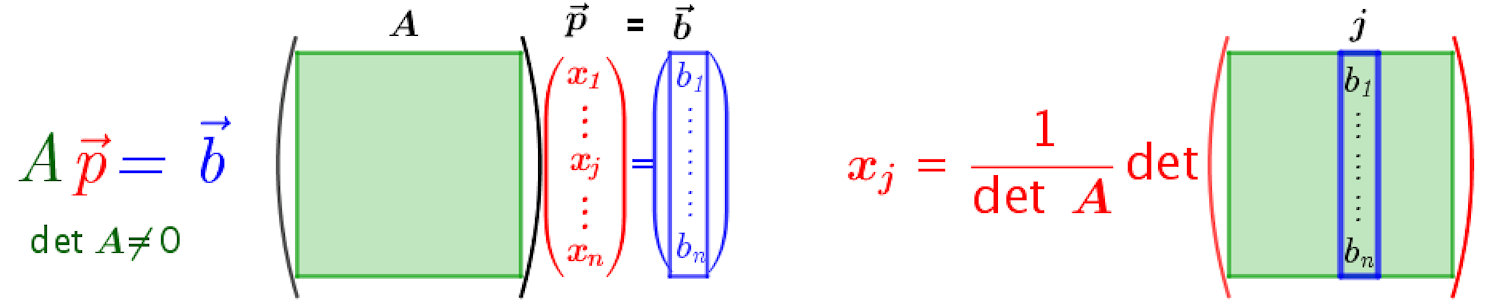
Abb. 2.29 Die Cramer'sche Regel gibt für reguläre
\(n{\times} n\)-Matrizen die Komponenten des Lösungspunktes explizit an. Für \(x_j\)
ist die \(j\)-te Spalte von \(A\) durch die rechte Seite \(\vec b\) zu ersetzen und
von der so entstandenen Matrix ist die Determinante zu bilden.
|
||||||||
|
Dieser Zusatz ist für alle, die sich immer noch wundern, dass die Rechtsinverse \(A^{-1}\) einer Matrix \(A\) auch ihre Linksinverse ist.
Es erstaunt ja, dass die Zeilen der Inversen zu den Spalten von \(A\) genauso gut "passen", wie die Spalten der Inversen zu den Zeilen von \(A\),
insbesondere ist nicht unmittelbar einsichtig, wieso aus Ersterem automatisch Zweiteres folgen soll.
"Passen" meint hier: Skalarprodukte fast immer 0, d.h. orthogonal, bis auf je eine Ausnahme mit Skalarprodukt 1. Wir geben hier dafür eine Erklärung, die den Laplace'schen Entwicklungssatz 2.12 nutzt: \[ \text{det}A = \sum_{i=1}^n(-1)^{i+j}a_{ij}\text{det}(A_{ij}) = \sum_{j=1}^n(-1)^{i+j}a_{ij}\text{det}(A_{ij}). \] Hierin ist die erste Summe die Entwicklung der Determinante nach der Spalte \(j\) von \(A\), die zweite Summe die Entwicklung der Determinante nach der Zeile \(i\) von \(A\). Wir setzen zur Abkürzung \(\hat c_{ij} = (-1)^{i+j}\text{det}(A_{ij})\). Wie man durch Vergleich mit Satz 2.14 sieht, ist \(\hat c_{ji} = \text{det}(A)c_{ij}\), wobei die \(c_{ij}\) gerade die Elemente der Inversen \(A^{-1}\) sind. (Die Reihenfolge der Indizes bei \(\hat c_{ji}\) ist richtig!) Aber das wollen wir jetzt unabhängig von Satz 2.14 einsehen. Wir schreiben die obige Gleichung noch einmal neu auf: \[ \text{det}A = \sum_{i=1}^n a_{ij}\hat c_{ij} = \sum_{j=1}^n a_{ij}\hat c_{ij}. \] Wir ändern einmal je einen Index ab (\(i\ne k\ne j\)): \[ \sum_{i=1}^n a_{ik}\hat c_{ij} = 0, \qquad\qquad \sum_{j=1}^n a_{kj}\hat c_{ij} = 0. \] Warum ist das so? Die erste Gleichung: Wir entwickeln nun eine Matrix nach der Spalte \(j\), die wie \(A\) aussieht, aber in Spalte \(j\) statt des dort ansässigen Spaltenvektors die \(k\)-te Spalte von \(A\) stehen hat, also eine Matrix mit zwei identischen Spalten. Deren Determinante ist natürlich 0. Für die zweite Gleichung argumentiert man ganz analog: Die \(i\)-te Zeile von \(A\) ist durch die \(k\)-te Zeile ersetzt worden, also wieder Determinante 0. Es stehen also senkrecht aufeinander folgende Vektoren: \[ \text{Spaltenvektoren (erstere aus $A$):}\qquad(a_{ik})_{i=1\dots n} =: \vec a_k\ \bot\ \vec c_j := (\hat c_{ij})_{i=1\dots n}, \] \[ \text{Zeilenvektoren (erstere aus $A$):}\qquad(a_{kj})_{j=1\dots n} =: \vec a^k\ \bot\ \vec c^j := (\hat c_{ij})_{j=1\dots n}. \] Setzt man alles zusammen, so ist klar, dass die Matrix \((\hat c_{ji})\) (man achte auf die Transposition!) bis auf den Faktor \(\frac{1}{\text{det}A}\) die Inverse von \(A\), sowohl von links (siehe oben "Spaltenvektoren") als auch von rechts (siehe oben "Zeilenvektoren") sein muss, dennn sie verhält sich automatisch wie verlangt. Der Grund liegt letztlich darin, dass der Entwicklungssatz für Zeilen und Spalten gleichermaßen funktioniert und beide Male die selben Zahlen \((\hat c_{ij})\) benutzt. Man könnte jetzt noch argumentieren, dass vielleicht noch etwas "Wunderbares" in Satz 2.12 steckt, dessen Beweis im Buch ja ausgelassen ist. Wir können Sie beruhigen, der Beweis benutzt nur ganz glasklare Eigenschaften der Determinante wie die Tatsache, dass sie linear in allen Spaltenvektoren und allen Zeilenvektoren ist und bei Vertauschung zweier Zeilen oder Spalten das Vorzeichen wechselt und ist nicht geheimnisvoll. |
||||||||||
| Abschnitt 2.4.7 Seite 187 1. Auflage: Seite 182 |
|
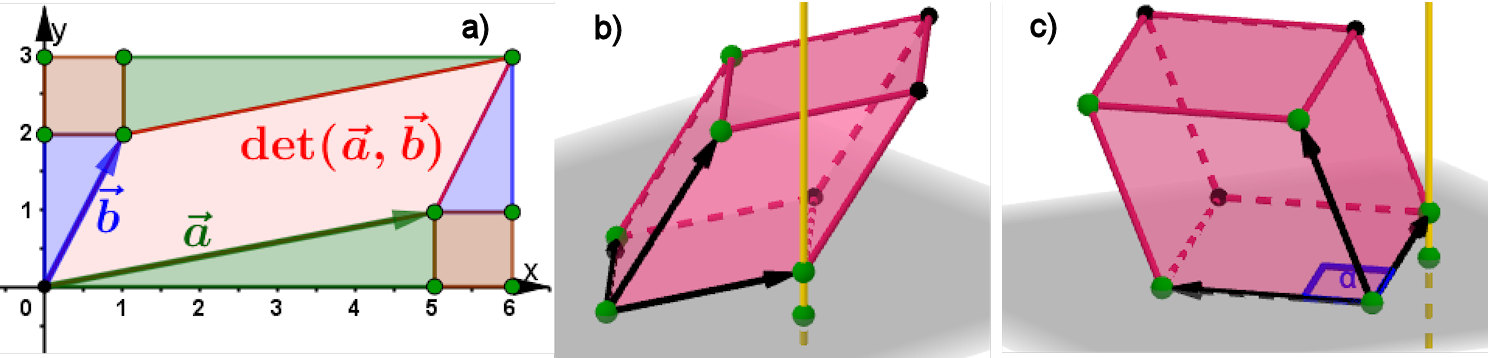
Abb. 2.30 Die Determinante
liefert orientierte Flächen. Es ist hier \(\vec{a}=\overrightarrow{OA}\) und
\(\vec{b}=\overrightarrow{OB}\).
a) Der Winkel zwischen \(\vec{a}\) und \(\vec{b}\) ist mathematisch positiv orientiert. Darum ist die Determinante \(|\vec{a}\, \vec{b}|\) (grün) ebenfalls positiv. In der verwendeten GeoGebra-Datei können Sie an \(A\) und \(B\) beliebig ziehen, die hervorgehobene Parallelogrammfläche ändert ihre Farbe, wenn Sie, wie in b), eine Stellung erzeugen, in der die Determinante negativ (rot) wird. Hier ist tatsächlich der Winkel \(\angle(AOB)\) mathematisch negativ. Die Formel in c) bringt es auf den Punkt: Das Vertauschen zweier Vektoren ändert das Vorzeichen der Determinante. |
||||||||
| Abschnitt 2.4.7 Seite 187 1. Auflage: Seite 182 |
|
Abb. 2.31 Die Determinante berechnet
Fläche und Volumen. a) Die Determinante
\(\det(\vec{a},\vec{b})=\left|\begin{smallmatrix}a_x&b_x\\a_y&b_y\\\end{smallmatrix}\right|\) berechnet den
Flächeninhalt des von \(\vec{a}\) und \(\vec{b}\) aufgespannten Parallelogramms. b) Das von drei linear unabhängigen Vektoren \(\vec{a},\,\vec{b}, \,\vec{c}\) aufgespannte (i.A. schiefe) Prisma nennt man einen Spat oder ein Parallel-Epiped. Sein Volumen wird von der Determinante \(\det(\vec{a},\vec{b},\vec{c})\) berechnet. c) zeigt denselben Spat. Dieser Spat hat nur zwei Rechtecke als Seiten, die anderen sind "echte" Parallelogramme. Dennoch meint man, einen Quader zu sehen. |
||||||||
| Abschnitt 2.4.8 Seite 188 1. Auflage: 2.4.7.1 Seite 183 |
|
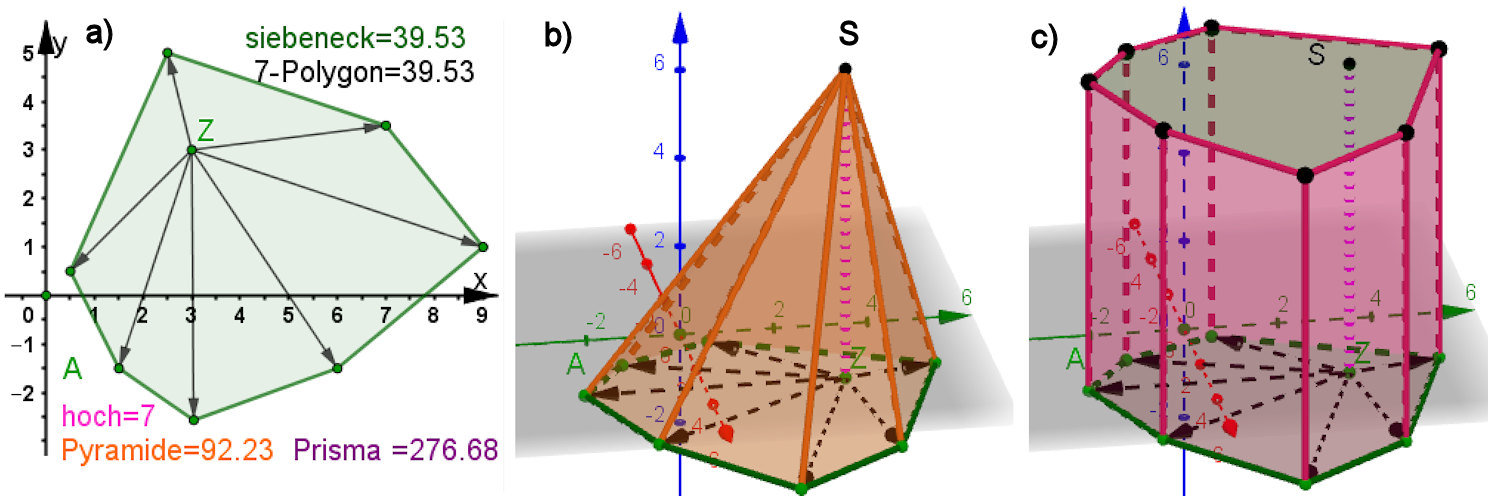
Abb. 2.32 Siebeneck mit Pyramide
und Prisma. a) In der xy-Ebene ist ein Siebeneck definiert und ein
beliebiger Punkt \(Z\). Näheres steht im Text. b) Mit einer variablen
Höhe (violett) ist \(S\) über \(Z\) platziert. Zum Zeichnen der Pyramide in GeoGebra
ist das Siebeneck
und \(S\) zu wählen, der von GeoGebra angegebene Wert des Volumens ist
\(\frac{1}{3}\mbox{Grundfläche}\cdot\mbox{Höhe}\), wie es sich gehört.
c) Auch für das Prisma ist das Volumen natürlich formelgemäß ausgerechnet.
|
||||||||
| Abschnitt 2.4.8 Seite 189 1. Auflage: Seite 184 |
|
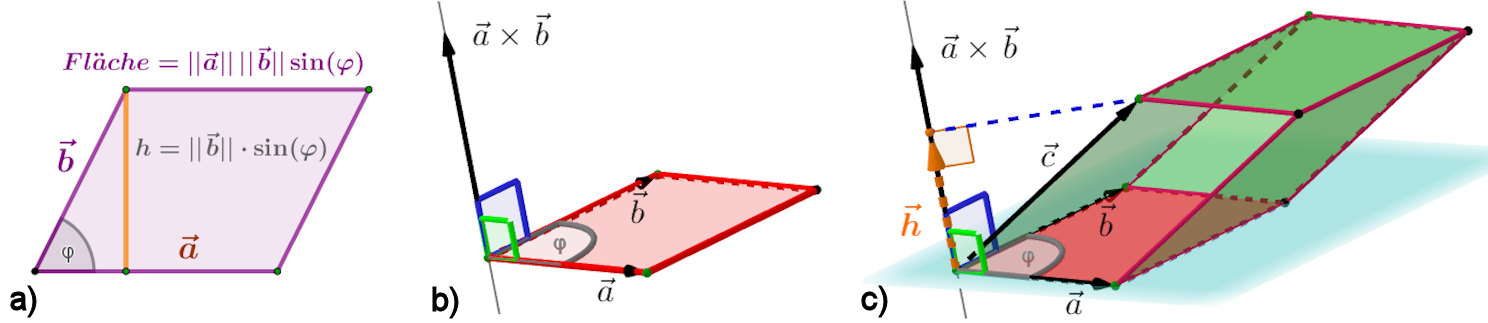
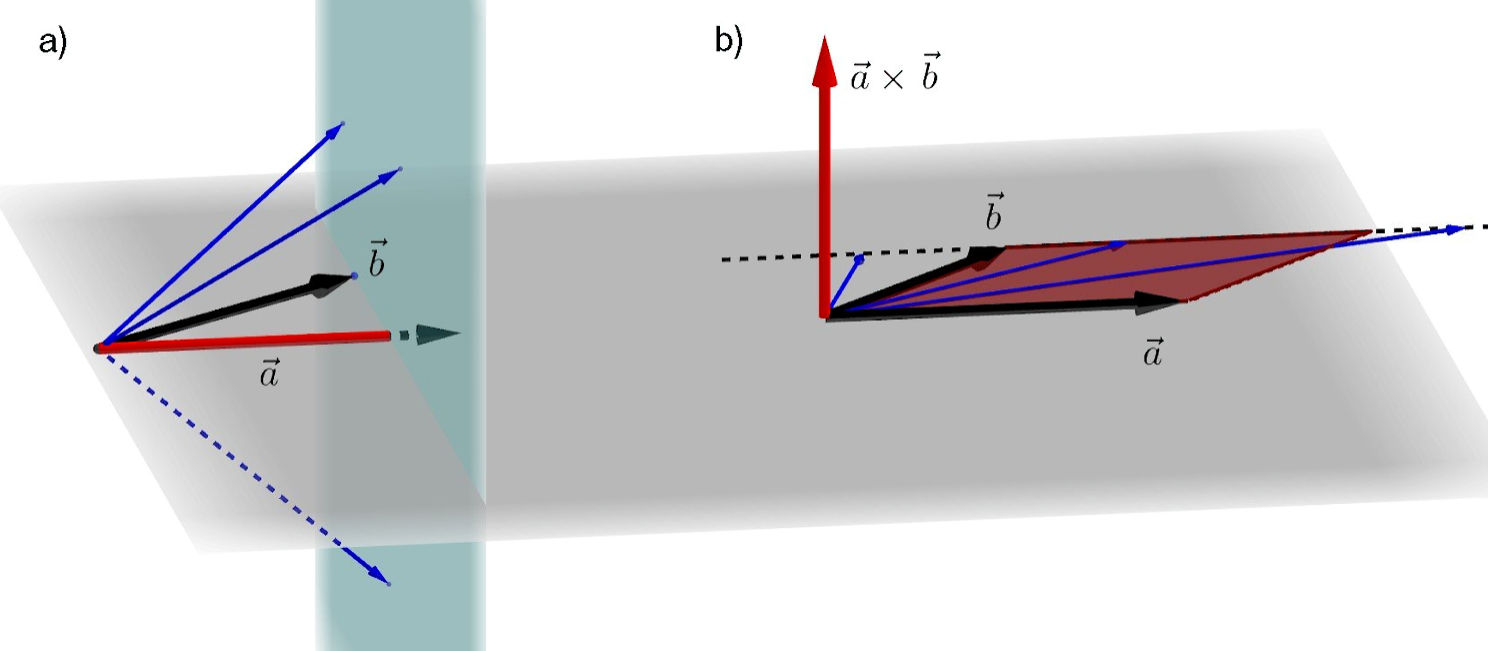
Abb. 2.33 Kreuzprodukt und Spatprodukt.
a) Die Norm des Kreuzproduktes ist die Fläche des von \(\vec{a}\) und \(
\vec{b}\) aufgespannten Parallelogramms. b) Das Kreuzprodukt \(\vec{a}
{\times}\vec{b}\) steht auf \(\vec{a}\) und \(\vec{b}\) senkrecht und hat die in a)
berechnete Fläche als Länge. Es ist so orientiert, dass \(\vec{a},\,\vec{b},
\,\vec{a}{\times}\vec{b}\) ein Rechtssystem ist.
c) Bildet ein dritter Vektor \(\vec{c}\) mit dem genannten
Parallelogramm einen Spat, dann ergibt sich durch Projektion von \(\vec{c}\)
auf das Kreuzprodukt die Höhe und mit ihr nach Satz 2.16 2.)
das Volumen \(V=\langle\vec{a}{\times}\vec{b},\vec{c}\,\rangle\). Das so gebildete
Skalarprodukt heißt auch Spatprodukt.
|
||||||||
| Abschnitt 2.4.9 Seite 191 |
|
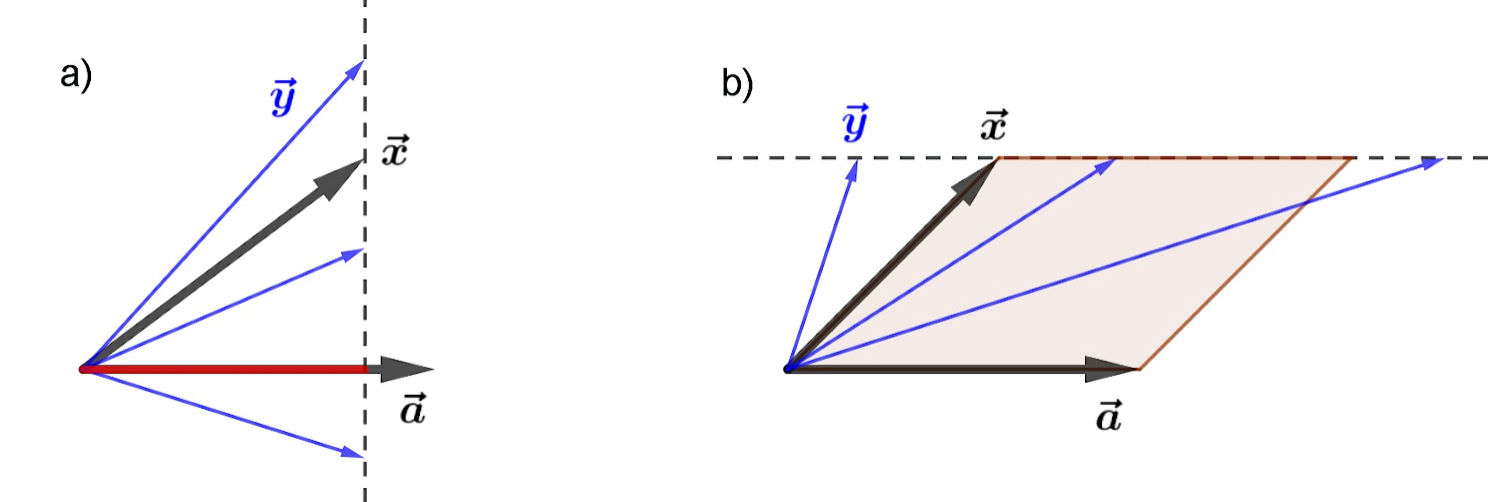
Abb. 2.34 Zur "Division" von
Vektoren. a) Denselben Wert des Skalarproduktes \(\vec a\cdot\vec x\) bekommt man, wenn man \(\vec a\cdot\vec y\) bildet mit irgendeinem der blauen Vektoren als \(\vec y\). b) Denselben Wert des Kreuzproduktes \(\vec a\times\vec x\) bekommt man, wenn man \(\vec a\times\vec y\) bildet mit irgendeinem der blauen Vektoren als \(\vec y\). |
||||||||
| Abschnitt 2.4.9 Seite 192 |
|
Abb. 2.35 "Division" von
Vektoren dreidimensional. a) zeigt dieselbe Situation wie Abb. 2.34 a), aber diesmal dreidimensional. Alle Vektoren, die wie die als Beispiele gezeigten blauen in der grünen Ebene enden, ergeben dasselbe Skalarprodukt \(\vec a\cdot\vec b\). b) Für das Kreuzprodukt ändert sich die Menge der Vektoren \(\vec b\), die denselben Wert von \(\vec a\times\vec b\) ergeben, nicht. Das Kreuzprodukt kann aber nun als roter Vektor, der auf der von \(\vec a\) und \(\vec b\) aufgespannten grauen Ebene senkrecht steht, dargestellt werden. |
||||||||
| Abschnitt 2.5.1 Seite 195 1. Auflage: 2.5.1 Abb. 2.34 Seite 188 |

|
Abb. 2.36 Lineare
Abbildungen des \(\mathbb R^2\) auf sich. Alle lassen den Ursprung fest.
a) und b) Drehungen um den Ursprung, c) Spiegelung an einer
Ursprungsgeraden, d) Zentrische Streckung vom Ursprung aus,
e) Scherung mit einer Ursprungsgeraden als Scherachse, hier der x-Achse,
f) Scherung mit nachfolgender Achsenstreckung. Die Matrizen sind unten genannt.
|
||||||||
| Abschnitt 2.5.1.5 Seite 199 |
|
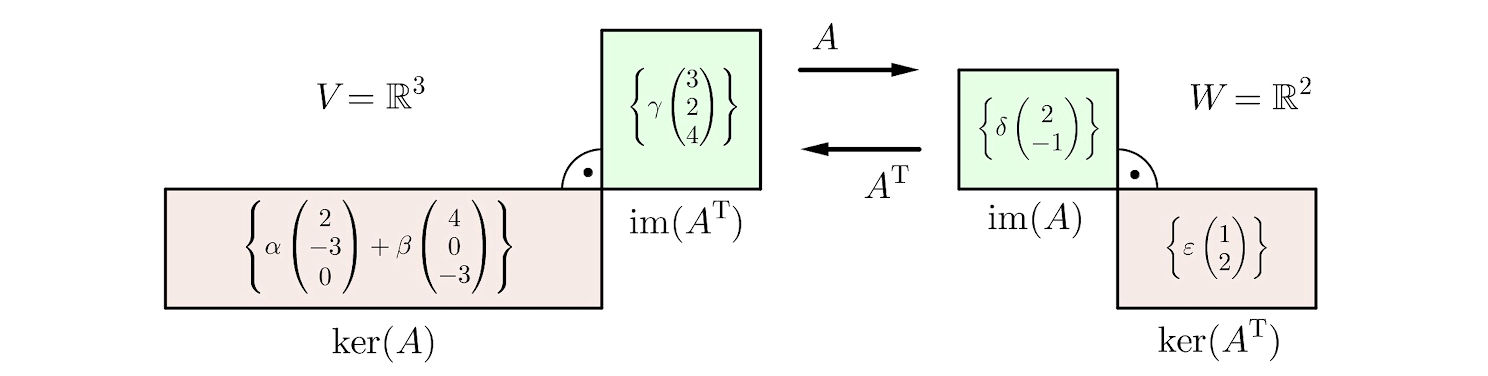
Abb. 2.37 Die
direkten Summen zu einer Matrix. Für die Matrix \(A = \bigl(\begin{smallmatrix} 3&2&4 \\ -1.5&-1&-2\end{smallmatrix}\bigr)\) sind hier die vier Unterräume schematisch dargestellt. Jeder Unterraum ist durch ein Rechteck repräsentiert, innerhalb dessen die Vektoren des Unterraums als Linearkombination von Basisvektoren dargestellt sind. Kerne von Abbildungen sind rot unterlegt, Bildräume grün. Die beiden Abbildungen \(A\) und \(A^{\top}\) wirken im Wesentlichen nur von grünem Raum zu grünem Raum, denn alles in roten Räumen wird auf \(\vec0\) abgebildet. |
||||||||
| Abschnitt 2.5.1.5 Seite 200 |
|
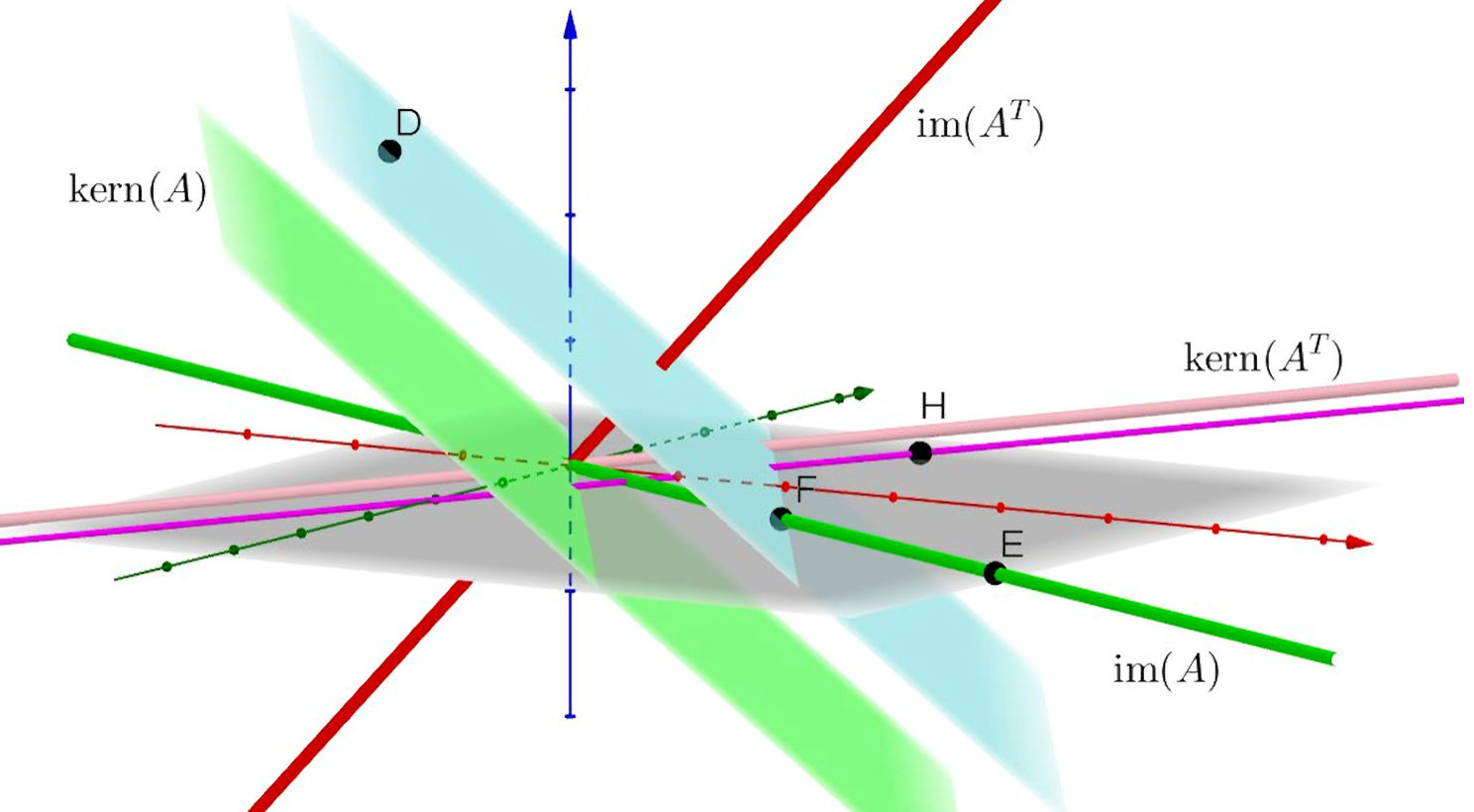
Abb. 2.38 Die vier
Unterräume zu einer Matrix. Für dieselbe Matrix wie in Abb. 2.37 sind hier die vier Unterräume im \(\mathbb R^3\) zu sehen. Alles, was zu \(A\) gehört, ist grün, was zu \(A^{\top}\) gehört, ist rot oder rosa. Die türkisfarbene Ebene wird unter \(A\) auf den Punkt \(E\) abgebildet, das gilt insbesondere für den exemplarischen Punkt \(D\). Die lila Gerade mit Punkt \(H\) wird unter \(A^{\top}\) auf \(B\) abgebildet. Weitere Erläuterungen stehen im Text. |
||||||||
| Anregung 2.2
Abschnitt 2.5.1.5 Seite 200
|
|
|||||||||
| Abschnitt 2.5.1.6 Seite 201 |
|
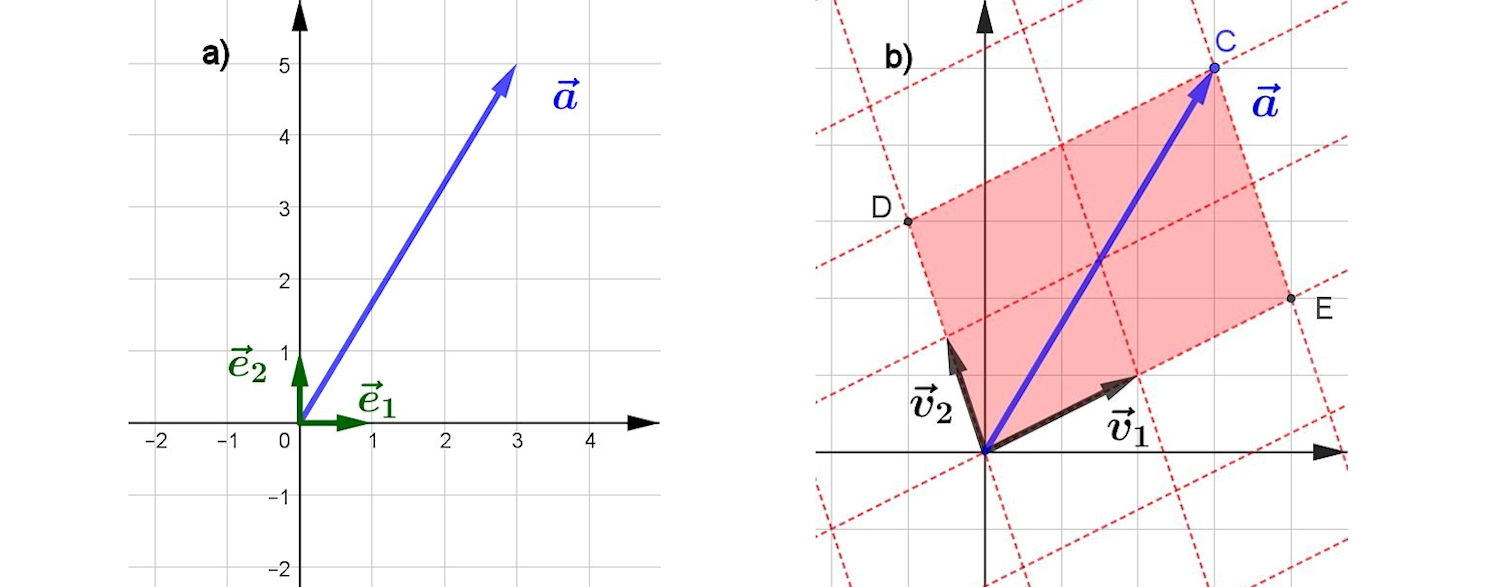
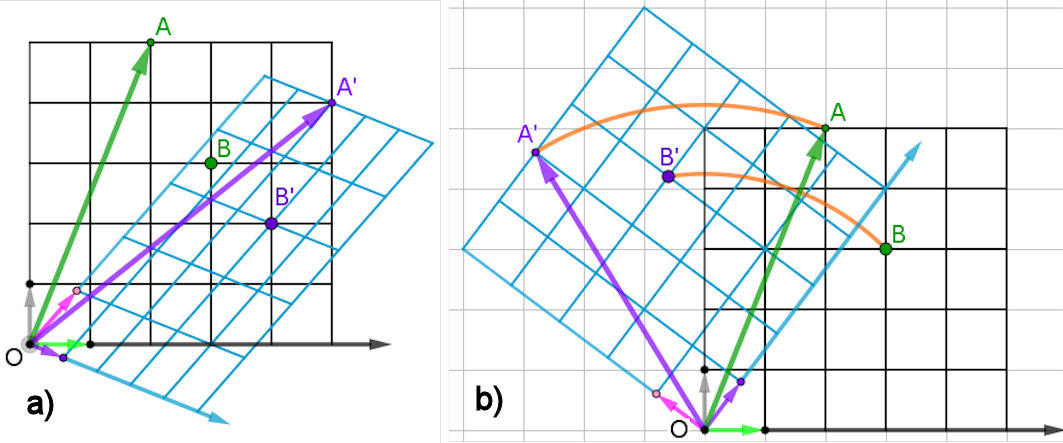
Abb. 2.39 Basiswechsel im
\(\mathbb R^2\). In a) ist der Vektor \(\vec a\) zusammen mit der Standardbasis \(\vec e_1\) und \(\vec e_2\) gezeigt, man liest am Koordinatengitter ab, dass \(\vec a = 3\vec e_1 + 5\vec e_2\) ist. In b) ist die neue Basis \(\vec v_1\) und \(\vec v_2\) zu sehen. Sie definiert ein schräges Koordinatengitter aus rot gestrichelten Geraden. Die Parallelen zu \(\vec v_1\) und \(\vec v_2\) durch den Endpunkt \(C\) von \(\vec a\) definieren die Schnittpunkte \(E\) und \(D\) mit den Geraden durch die neuen Basisvektoren. An ihnen liest man ab, dass \(\vec a = 2\vec v_1 + 2\vec v_2\) ist. |
||||||||
| Abschnitt 2.5.1.6 Seite 203 |
|
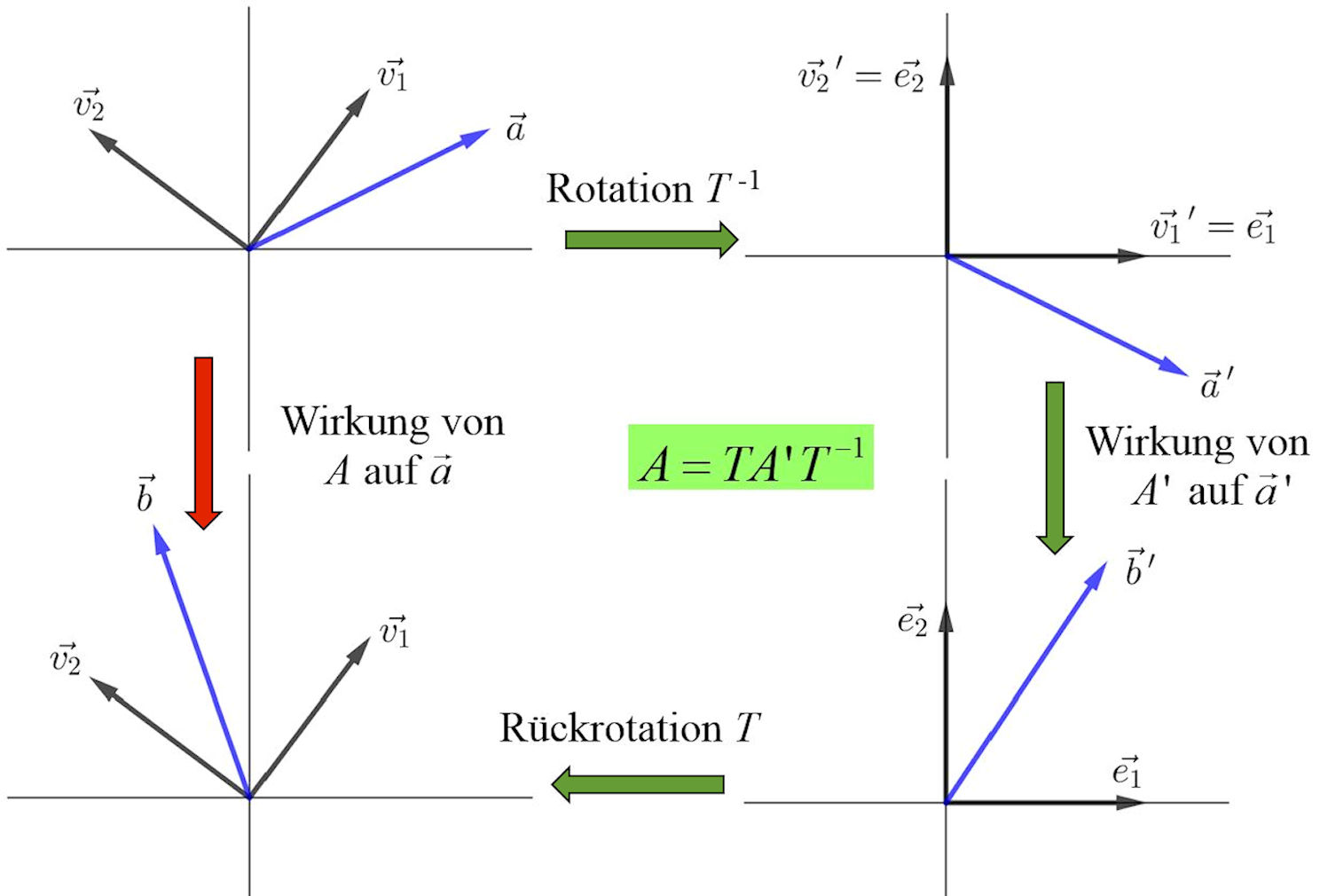
Abb. 2.40 Basiswechsel
bei Orthonormalbasen. In diesem Bild sind alle Vektoren, d.h. alle 2-Tupel von reellen Zahlen, so eingetragen, als bezögen sie sich auf die Standardbasis. Die Rotation \(T^{-1}\) führt Vektoren ohne Strich in solche mit Strich über, \(T\) bewirkt das Gegenteil. Es gilt \(A'\vec a\,' = \vec b'\) und \(A\vec a = \vec b\). Nun kann man auf zwei Wegen von \(\vec a\) zu \(\vec b\) kommen, und daraus folgt \(A = TA'T^{-1}\). |
||||||||
| Anregung 2.3
Abschnitt 2.5.1.6 Seite 203
|
|
|||||||||
| Abschnitt 2.5.1.7 Seite 204
1. Auflage 2.5.1.5 Abb. 2.35 Seite 191 |

|
Abb. 2.41 Axonometrische und isometrische Darstellung und Schattenwurf.
In allen drei
Bildern handelt es sich um denselben Körper, einen Würfel mit aufgesetzter
Dreieckspyramide.
a) zeigt (fast) die standardmäßige Kavalierperspektive
(siehe auch im Text),
b) demonstriert die isometrische Darstellung, bei der die Bilder der
Achsen im \(120^{\circ}\)-Winkel stehen und in gleichem Maße verkürzt werden.
c) zeigt den Schatten dieses Körpers in parallelem Licht, z.B.
Sonnenlicht. Die Rechnung finden Sie im Text.
|
||||||||
| SAbschnitt 2.5.2 Seite 205 1. Auflage: Abb. 2.36 Seite 192 |
|
Abb. 2.42 Matrizen zu den Abbildungen
\[A_{a)}= \left(
\begin{array}{cc}
\frac{5}{9} & \frac{7}{9} \\
-\frac{2}{9} & \frac{8}{9} \\
\end{array}
\right),\qquad
A_{b)}=\left(
\begin{array}{cc}
\frac{3}{5} & -\frac{4}{5} \\
\frac{4}{5} & \frac{3}{5} \\
\end{array}
\right)\]
|
||||||||
| Abschnitt 2.5.3 Seite 207 1. Auflage: 2.5.3.1 Abb. 2.34 Seite 193 |
|
Abb. 2.43 Abbildungen mit zwei verschieden
Eigenwerten und in Rot gezeichneten Eigenvektoren. a)
"beliebiger" Fall, b) Geraden-Spiegelung,
c)
Scherung mit Achsen-Streckung.
|
||||||||
| Abschnitt 2.5.3.2 Abb. 2.44 Seite 209 1. Auflage: Abb. 2.38 Seite 195 |
|
Abb. 2.44 a)
Singuläre Matrix mit eindimensionalem Bildraum und Kern. Der
Bildraum wird von dem Eigenvektor \(\vec v_1=(2,2)^{\m T}\) zum Eigenwert
\(\frac{3}{2}\) aufgespannt. Der andere Eigenwert ist 0 mit dem Eigenvektor
\(\vec v_2=(-1,2)^{\rm T}\), dieser spannt einen eindimensionalen Kern auf (siehe Text). b) Zentrische Streckung mit Streckfaktor \(k=\lambda_1=\lambda _2=\frac{3}{2}\), jeder Ortsvektor ist Eigenvektor und wird auf das \(\frac{3}{2}\)-fache gedehnt, c) Scherung, die x-Achse ist Scherachse, Scherwinkel ist der mit dem Lot gebildete blaue Winkel, jeder Punkt wandert dementsprechend parallel zur Scherachse. |
||||||||
| Abschnitt 2.6.1.1 Abb.2.45 Seite 210 1. Auflage: Abb. 2.39 Seite 197 |
|
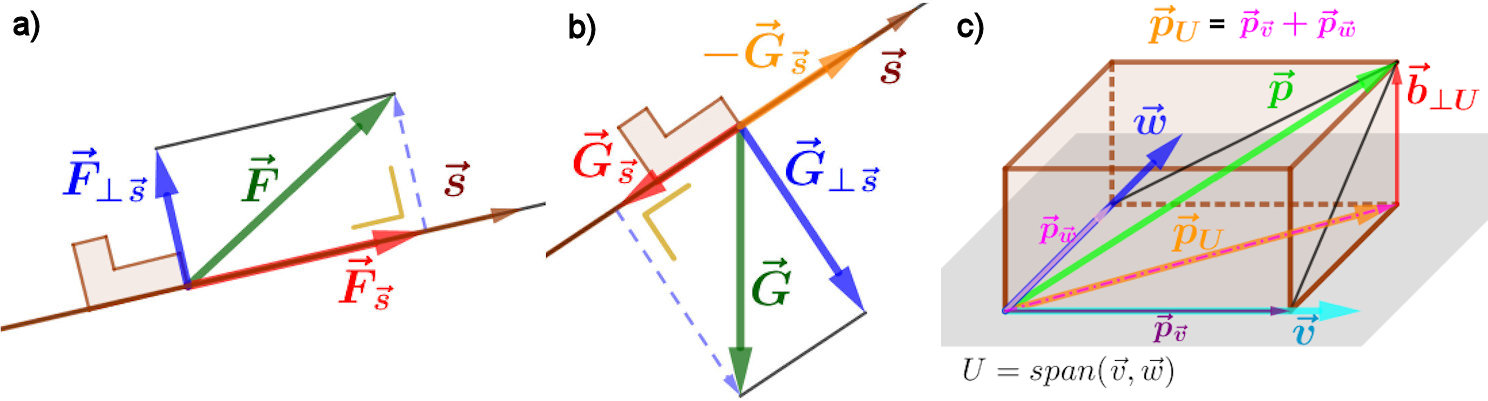
Abb. 2.45 Orthogonale
Kraftzerlegung im \(\mathbb R^2\). Rechte Winkel sind in a) und b) durch eine
ockerfarbene Zacke gekennzeichnet.
Texte und Rechnungen folgen. a) Kräfte bei einem Schienenwagen,
b) Kräfte bei einem Wagen auf einer schiefen Ebene, c)
orthogonale Projektion auf einen Unterraum mit orthogonaler Basis.
|
||||||||
| Abschnitt 2.6.1.3 Seite 213 1. Auflage: Abb. 2.40 Seite 200 |
|
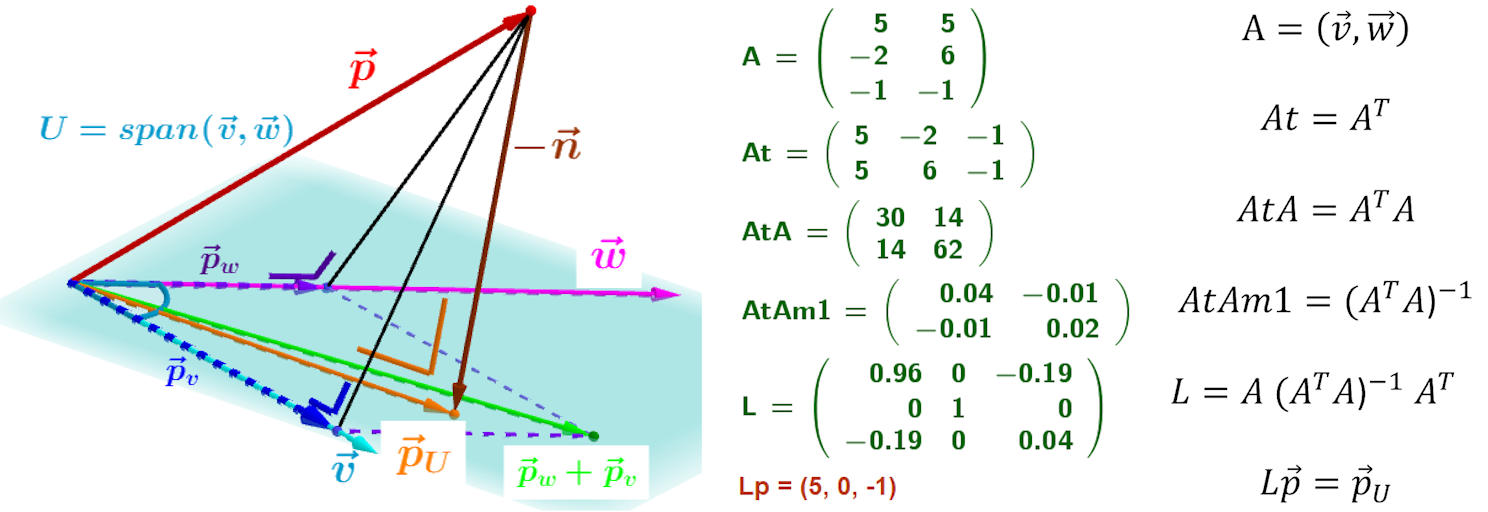
Abb. 2.46 Orthogonalprojektion auf den von \(\vec v\) und \(\vec w\) aufgespannten
Unterraum U. Rechte Winkel sind durch farbige Zacken gekennzeichnet. Rechts stehen die Formeln in Klarschrift. 1.) Wir projizieren \(\vec{p}\) orthogonal auf \(\vec{v}\) und erhalten \(\vec{p}_{\vec{v}}\), also haben wir auf \(U_{\vec v}={\rm span}(\vec{v})\) projiziert, den von \(\vec{v}\) aufgespannten Unterraum. 2.) Nun wird \(\vec{p}\) auf \(U={\rm span}(\vec{v},\vec{w})\) orthogonal projiziert. Das Ergebnis ist der orangefarbene Vektor \(\vec{p}_U\), der damit auch in der blauen Ebene \(U\) liegt, siehe Text. 3.) Es ist der "Ebenen-Projektions-Irrtum" dargestellt: Der rote Vektor \(\vec p\) und die von seiner Spitze ausgehenden schwarzen "Projektionslinien" liegen nicht in der blauen Ebene. In ihr aber ist die (grüne) Summe aus den Projektionen \(\vec{p}_{\vec{v}}\) und \(\vec{p}_{\vec{w}}\) i.A. nicht \(\vec{p}_U\). |
||||||||
| Abschnitt 2.6.1.4 Seite 215 |

|
Abb.2.47 Beispiel für eine lineare Regression. a) zeigt die drei Punkte, die Regressionsgerade und zusätzlich Quadrate, die jeweils \((\hat y_i - y_i)^2\) als Fläche haben. Ihre Flächensumme ist genau für die Regressionsgerade minimal. b) zeigt die beteiligten Vektoren \(\vec x\) (grün), \(\vec y\) (blau), \(\vec 1\) (schwarz) und die Projektion \(\vec{\hat y}\) (rot). Die zwei Parallelen durch \(\vec{\hat y}\) zu \(\vec x\) und \(\vec 1\) bilden zusammen mit diesen ein Viereck (orange), an welchem man die Werte von \(a\) und \(b\) als Längenanteil 0.69 bzw. 0.77 ablesen kann. |
||||||||
| Anregung 2.4
Abschnitt 2.6.1.4 Seite 216
|
|
|||||||||
| Abschnitt 2.6.2.1 Abb. 2.48 Seite 216 1. Auflage: Abb. 2.41 Seite 201 |
|
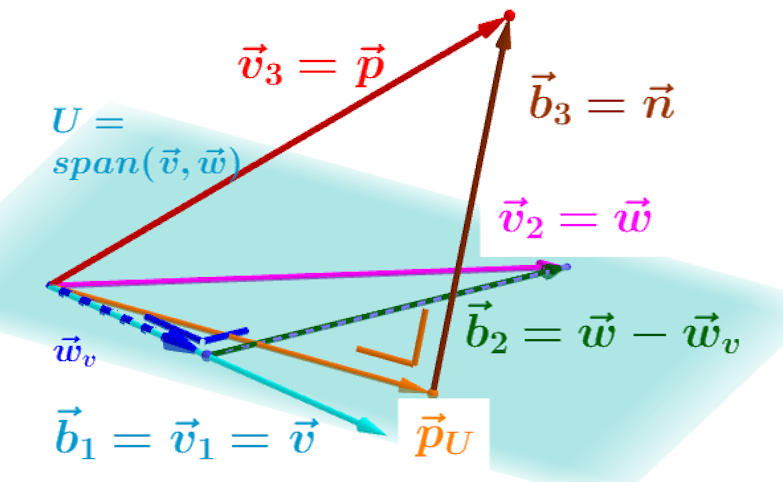
Abb. 2.48 Orthogonalisierung im \(\mathbb R^3\), Gram-Verfahren
Konstellation wie in Abb. 2.46. Rechnungen sind in Beispiel 2.6. Mit \(M=\{\vec v_1,\,\vec v_2,\,\dots,\,\vec v_m\}\) setzen wir \(\vec{v}:=\vec v_1\), \(\vec w:=\vec v_2\), \(\vec{p}:=\vec{v}_3\). Für \(U_3={\rm span}(\vec v,\,\vec w,\,\vec p)\) suchen wir eine ONB mit \(U_3={\rm span}(\vec b_1,\,\vec b_2,\,\vec b_3)\). Schritt 1: \(\vec b_1:=\vec v_1=\vec v\), Schritt 2: \(\vec b_2:=\vec w-\vec{w}_{\vec v}\), es ist \(\vec b_1\,\bot\,\vec b_2\). Schritt 3: Mit \(U_2:={\rm span}(\vec b_1,\,\vec b_2)\) wird wie in Beispiel 2.5 der Vektor \(\vec p_{U_2}\) bestimmt und \(\vec b_3:=\vec p-\vec p_{U_2}\) gesetzt. Es ist \(\vec b_3\,\bot\,\vec b_1\) und \(\vec b_3\,\bot\,\vec b_2\). |
||||||||
|
|
||||||||||
|
Abschnitt 2.7 Abb. 2.50 Seite 220 1. Auflage: 2.7.1 Abb. 2.43 Seite 204 |

|
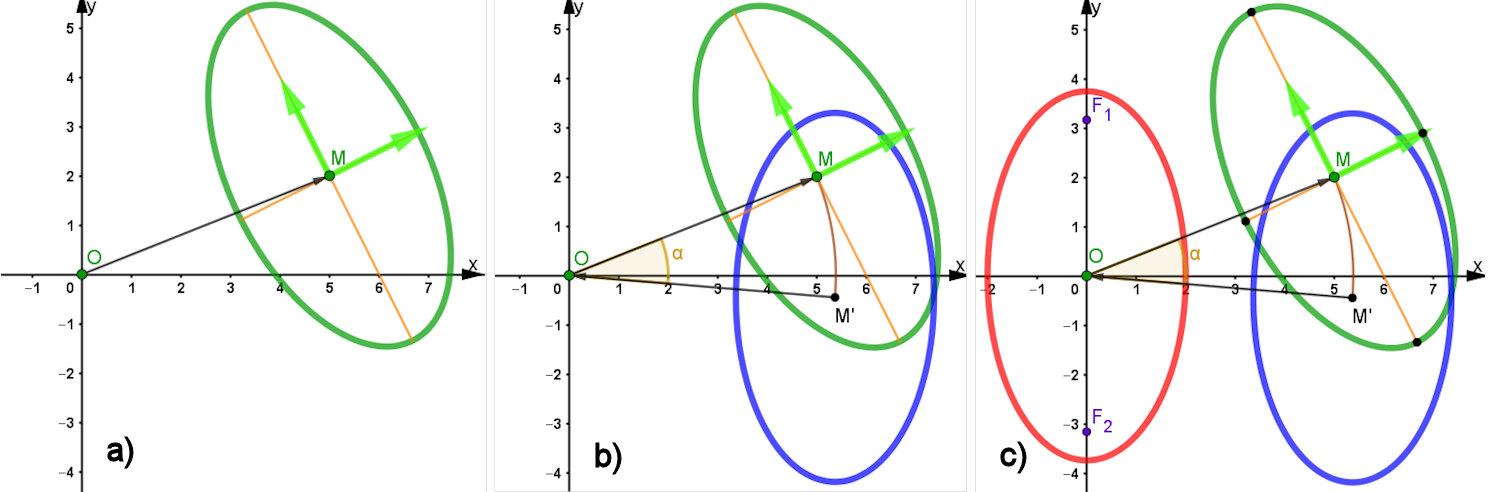
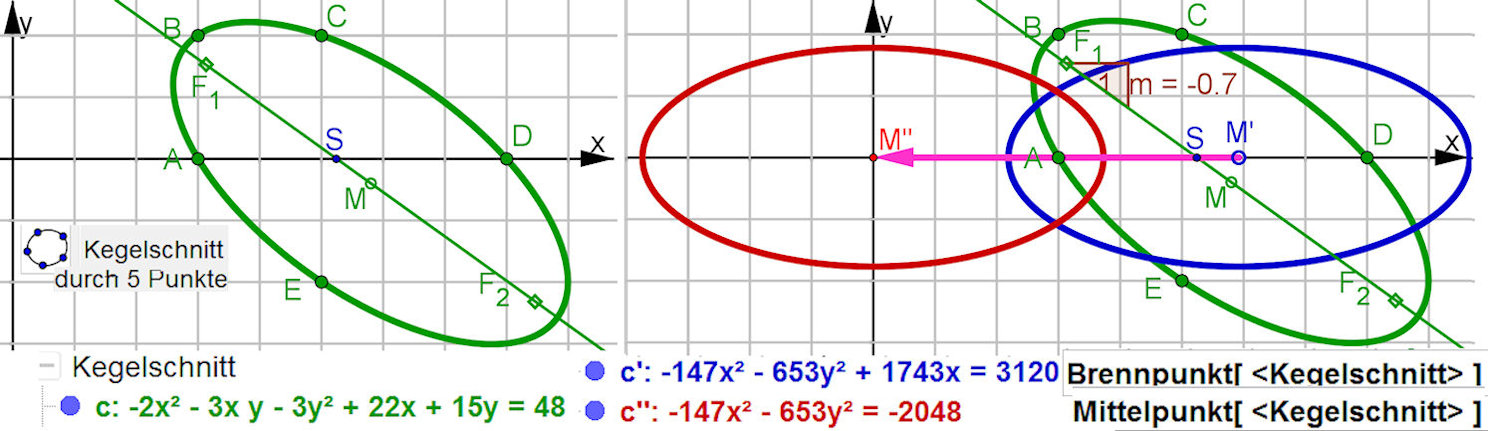
Abb. 2.50 Kegelschnitte aus fünf Punkten.
Es sind hier die
Punkte \(A,\,B,\,C,\,D,\,E\) auf die ablesbaren (ganzzahligen)
Kästchenkreuzungen gesetzt. Dann ist nur noch
Punkt \(C\) bewegt worden. a) Ellipse, b) Hyperbel,
c) Geradenkreuz, da \(C\) exakt auf der Geraden \(AD\) liegt, d) ist
scheinbar eine Parabel und c) ist wirklich eine Parabel. Das wird
im Text erläutert.
|
||||||||
| |
||||||||||
 |
Schiefe allgemeine Doppelkegel
Hier ist die Idee verfolgt, eine Parabel bzw. eine Hyperbel an einem Punkt zu spiegeln. Dies lässt sich in GeoGebra interaktiv realisieren. Die okerfarbenen Mantellinien definieren dann einen allgemeinen Kegel, der dann auch eine Regelfläche ist. parabolischerDoppelkegel.ggb hyperbolischerDoppelkegel.ggb |
|||||||||
|
2.7.3 Singulärwertzerlegung |
||||||||||
| Dieser Abschnitt ist neu in Auflage 2, darin gibt es kein Bild, | ||||||||||
| Abschnitt 2.7.4.1 Abb. 2.51 Seite 232 1. Auflage: 2.7.3.1 Abb. 2.44 Seite 210 |
|
Diese Abbildung bezieht sich auf die ausführliche Rechnung von Hand im Buch.
Abb. 2.51 Hauptachsentransformation für eine Ellipse. a) Gegeben ist das leere, grüne Oval, Mittelpunkt und Hauptachsen können erst zum Schluss eingetragen werden. b) Eine Drehung richtet die Ellipsenachsen parallel zu den Koordinatenachsen aus. c) Eine Verschiebung rückt den Mittelpunkt in den Ursprung. Bei dieser und den beiden folgenden GeoGebra-Dateien lassen sich die Schritte einzeln anklicken. |
||||||||
| Anregung 2.5
Abschnitt 2.7.4.2 Abb. 2.52 Seite 233 1. Auflage: 2.7.3.2 Abb. 2.45 Seite 212
|
|
|||||||||
| Anregung 2.6
Abschnitt 2.7.4.2 Abb. 2.53 Seite 233 1. Auflage: 2.7.3.2 Abb. 2.46 Seite 213
|
|
|||||||||
| Abschnitt 2.7.4.3 Abb. 2.54 Seite 235 1. Auflage: 2.7.3.3 Abb. 2.47 Seite 214 |
|
Abb. 2.54 Ellipse aus 5 Punkten, HAT im Blackbox-Whitebox-Prinzip.
Es wird ausgenutzt, dass GeoGebra auch von mit beliebigen Quadrikgleichungen gegeben Kegelschnitten
Brennpunkte und Scheitel angeben kann. Damit wird die Ellipse wird
passend gedreht und verschoben, so dass ihre Gleichung als
Mittelpunktsgleichung einer Ellipse erkennbar wird.
|
||||||||
|
|
||||||||||
| Abschnitt 2.7.5 Abb. 2.55 Seite 237 |
|
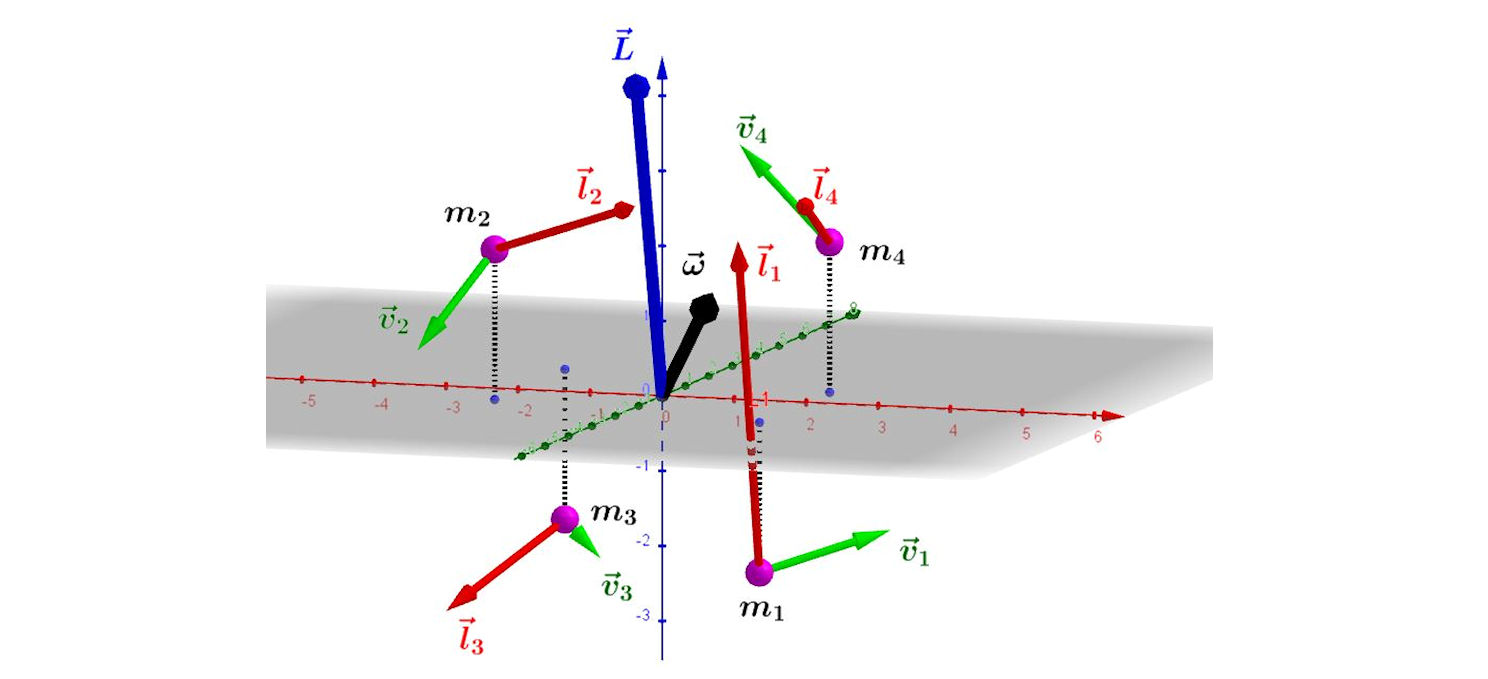
Abb. 2.55 Vier Massenpunkte. Die vier Massenpunkte in rosa haben die Massen \(m_1\), \(m_2\), \(m_3\) und \(m_4\). Damit ihre räumliche Lage besser einzuschätzen ist, haben sie einen gestrichelten "Stiel", auf dem sie stehen oder an dem sie hängen. An jedem Massenpunkt sind der Geschwindigkeitsvektor \(\vec v_i\) (grün) und der Drehimpulsvektor \(\vec l_i\) (rot) angeheftet, die aus dem schwarzen Drehvektor \(\vec\omega\) resultieren. Der Gesamtdrehimpuls \(\vec L\) ist in blau zu sehen. Die Länge aller Vektoren außer \(\vec\omega\) ist auf \(\frac{1}{4}\) gekürzt, \(\vec\omega\) ist auf das Dreifache verlängert worden. |
||||||||
| Abschnitt 2.7.5 Abb. 2.56 Seite 238 |
|
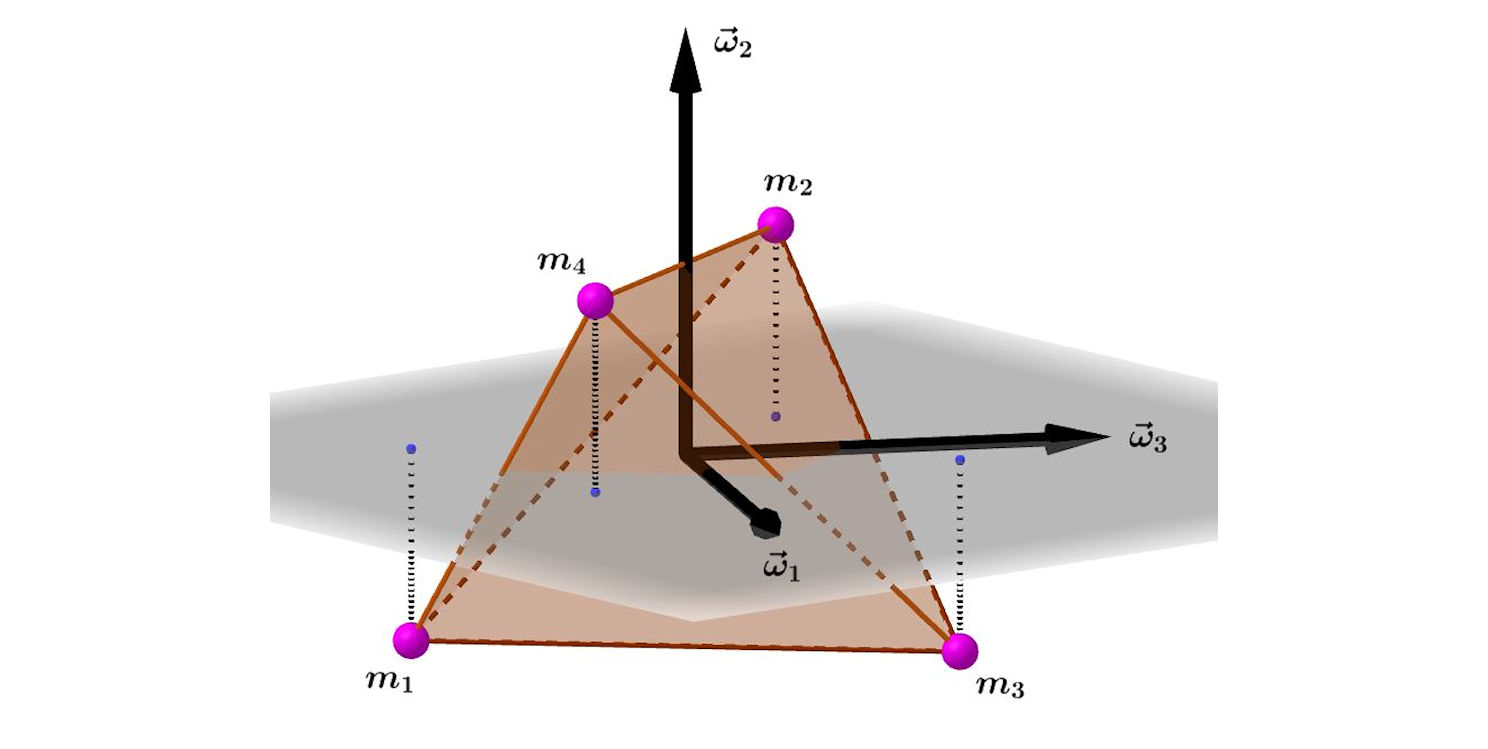
Abb.2.56 Drehachsen als Eigenvektoren von \(J\). Die Massenpunkte aus Abb. 2.55 sind hier ohne Geschwindigkeits- und Drehimpulsvektoren gezeigt. Dafür sind eine umhüllende Pyramide und die drei Eigenvektoren von \(J\) als Drehachsen \(\vec\omega_1\), \(\vec\omega_2\) und \(\vec\omega_3\) zu sehen, alle um den gleichen Faktor verlängert. Berechnung der Eigenvektoren, auch für 3 Punkte, Mathematica Quelltext |
||||||||
| Abschnitt 2.7.6 Abb. 2.57 Seite 239 1. Auflage: 2.7.3.3 Abb. 2.48 Seite 214 |
|
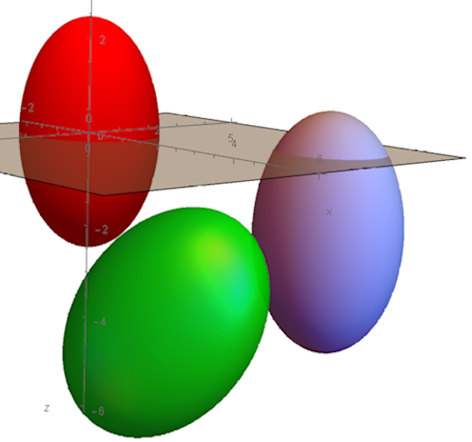
Abb. 2.57 Hauptachsentransformation.
Start: grünes Ellipsoid, Ziel: rotes Ellipsoid in
Ursprungslage.
|
||||||||
| Abschnitt 2.7.6 Abb. 2.58 Seite 240 1. Auflage: 2.7.4.1 Abb. 2.49 Seite 216 |

|
Abb. 2.58 Hauptachsentransformation für ein
Ellipsoid. a) Gegeben ist ein Ellipsoid über seine implizite
Gleichung. Gibt man diese in GeoGebra ein, so erscheint das grüne Ellipsoid
als ungegliedertes "Ei". Die Richtungen der Hauptachsen muss man erst
herausfinden, b) danach kann man das grüne Ellipsoid um
den Ursprung so drehen, dass die Hauptachsen zu den Koordinatenachsen
parallel sind, und das blaue Ellipsoid kann mit der transformierten
impliziten Gleichung gezeichnet werden. c) Nun ergibt sich der
Mittelpunkt \(M\) und man kann ihn in den Ursprung schieben, wodurch das rote
Ellipsoid in Hauptachsenlage entsteht.
Durch Rückwärtsdrehen von \(M\) erhält man nun endlich \(M_{ur}\), den
ursprünglichen Mittelpunkt. Die Rechnungen folgen im Text, Sie
finden sie auch hier zusammen mit der GeoGebra-Datei
und Hinweisen für Lehrende zur Konstruktion von Aufgaben mit vorgegebenen
"glatten" Ergebnissen.
|
||||||||
| Anmerkung zu den Abb. 2.59, 2.60, 2.61 und 2.62 auf den Seiten 243 und 244.
Wir haben uns entschlossen, Ihnen hier nicht die Bilder aus dem Buch zu präsentieren, sondern solche,
für die wir auch die vollständige Quelle in Mathematica angeben können.
Leider lassen sich in GeoGebra die 3D-Darstellungen nicht so einfach begrenzen. (Das gilt in der 2020 verfügbaren Version.) Implizite Gleichungen konnten in eine Wenn-Stuktur nicht eingegeben werden. Auf eine Parameterdarstellung wollten wir nicht wechseln, sondern die Gleichungen von Seite 218 verwenden. |
||||||||||
| Abschnitt 2.7.7 Abb. 2.59 Seite 243 1. Auflage: 2.7.5 Abb. 2.50 Seite 219 |
|
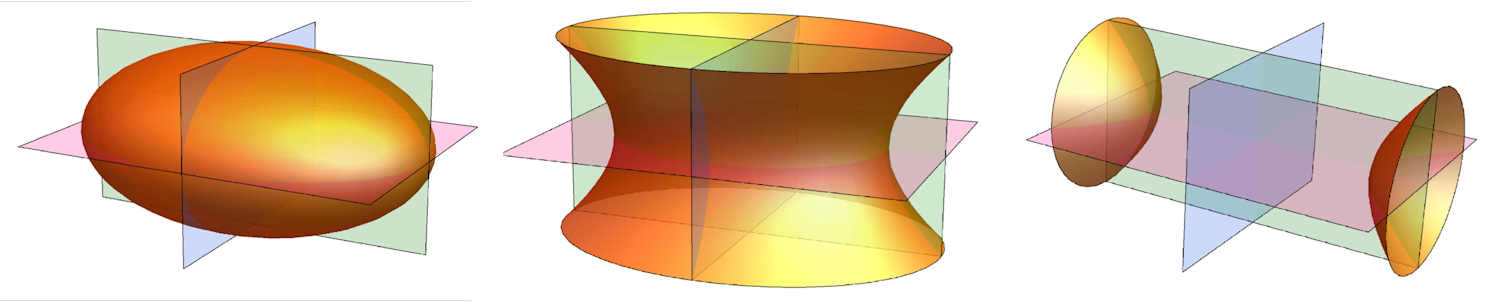
Abb. 2.59 3D-Quadriken mit drei Quadrattermen. a)
Ellipsoid, b) einschaliges Hyperboloid, c) zweischaliges Hyperboloid.
\(\frac{x^2}{a^2}+\frac{y^2}{b^2}+\frac{z^2}{c^2}=1\) \(\frac{2x^2}{a^2}+\frac{2y^2}{b^2}-\frac{z^2}{c^2}=1\) \(\frac{2x^2}{a^2}-\frac{2y^2}{b^2}-\frac{z^2}{c^2}=1\) |
||||||||
| Abschnitt 2.7.7 Abb. 2.60 Seite 243 1. Auflage: 2.7.5 Abb. 2.51 Seite 219 |

|
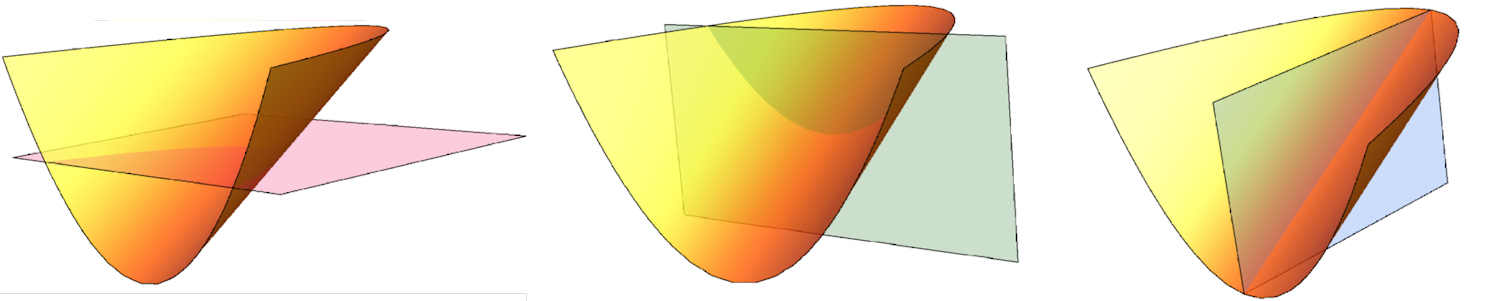
Abb. 2.60 Weitere Quadriken. a) elliptisches Paraboloid,
b) hyperbolisches Paraboloid, c) elliptischer Kegel.
\(\frac{2x^2}{a^2}+\frac{2y^2}{b^2}-\frac{z}{c}=1\) \(\frac{x^2}{a^2}-\frac{y^2}{b^2}-\frac{z}{c^2}=0\) \(\frac{x^2}{a^2}+\frac{y^2}{b^2}-\frac{z^2}{c^2}=0\) |
||||||||
| Abschnitt 2.7.7 Abb. 2.61 Seite 244 1. Auflage: 2.7.5 Abb. 2.52 Seite 220 |
|
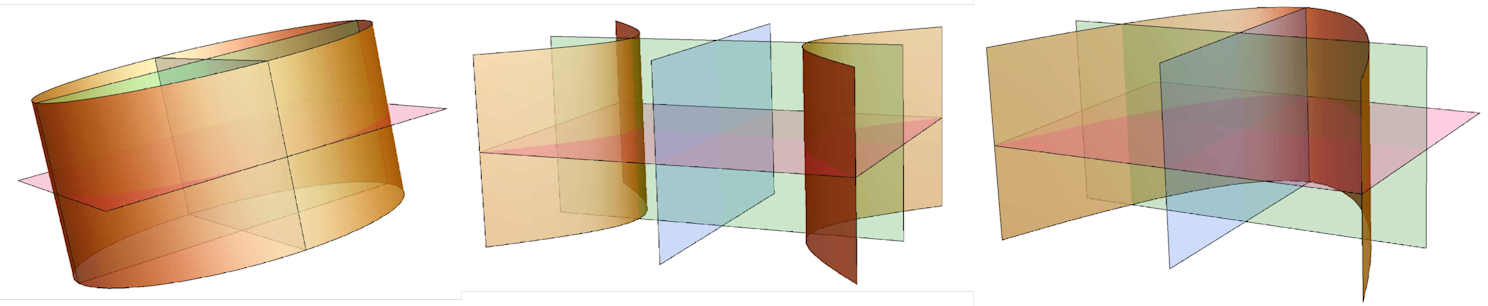
Abb. 2.61 Quadrik, Parabelrinne und ihre Schnitte a) mit der
xy-Ebene, b) mit der yz-Ebene, c) mit der xz-Ebene.
\(\frac{2x^2}{a^2}+\frac{3y}{b^2}-\frac{2z}{c^2}=0\) Die Gleichung wird bei \(a=4, b=3, c=2\) erfüllt von (4,-3,2), der vorderen, oberen Ecke, aber auch von den beiden Scheiteln \( (\pm b,\pm c) \). |
||||||||
| Abschnitt 2.7.7 Abb. 2.62 Seite 220 1. Auflage: 2.7.5 Abb. 2.53 Seite 220 |
|
Abb. 2.62 Zylinder-Quadriken. a) elliptischer Zylinder, b)
hyperbolischer Zylinder, c) parabolischer Zylinder.
\(\frac{x^2}{a^2}+\frac{y^2}{b^2}=1\) \(\frac{4x^2}{a^2}-\frac{3y^2}{b^2}=1\) \(\frac{2x^2}{a^2}+\frac{3y}{b^2}=1\) |
||||||||
| Abschnitt 2.7.8 Abb. 2.63 Seite 245 1. Auflage: 2.7.6 Abb. 2.54 Seite 221 |
|
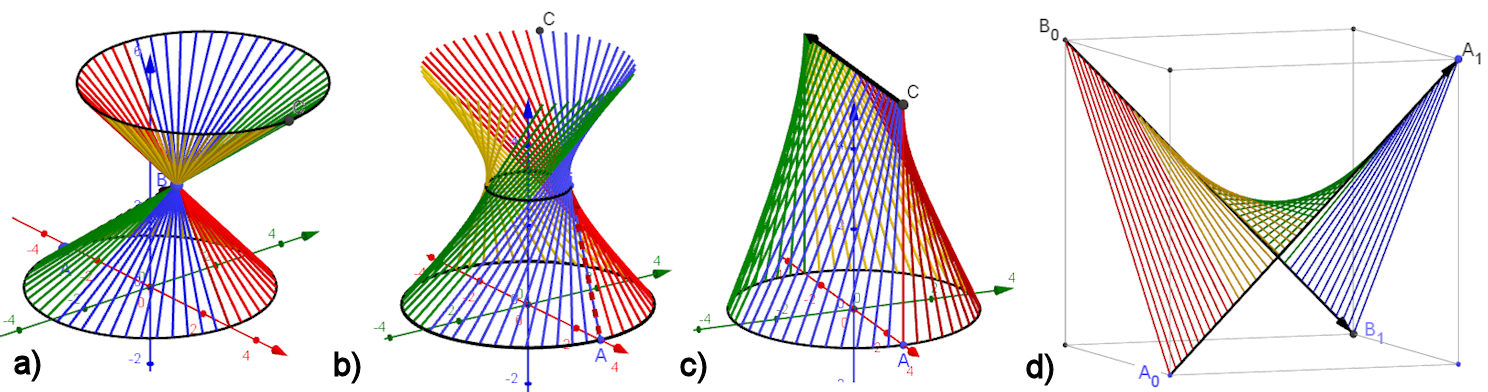
Abb. 2.63 Regelflächen. a) Schiefer Kegel, b) Hyperboloid, c) Konoid, d) Hyperbolisches Paraboloid, HP-Fläche. Entstehung: Sie werden alle durch Bewegung von Geraden - hier Strecken oder Strahlen - erzeugt, die jeweils einen Punkt auf beiden Leitkurven haben. Der Parameterbereich für \(s\) ist bei allen Bildern in vier Teile mit der Farbfolge rot, gelb, grün, blau eingeteilt. Im Einzelnen werden die Raumflächen im Text erläutert. | ||||||||
| ||||||||||
|
||||||||||
| Abschnitt 2.7.8 Abb. 2.64 Seite 346 1. Auflage: 2.7.6 Abb. 2.55 Seite 221 |
|
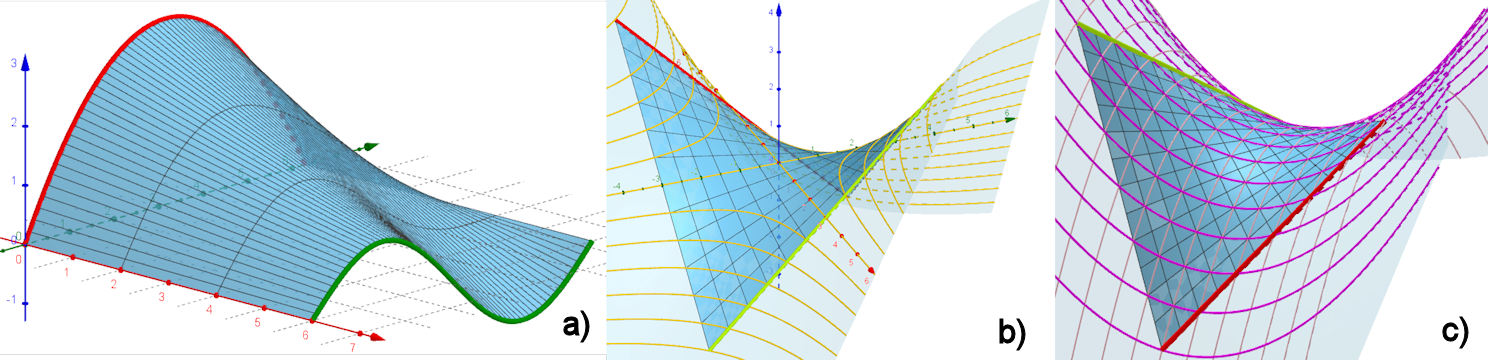
Abb. 2.64 Allgemeine Regelflächen.
a) mit zwei Leitkurven, einer Parabel und einer Sinuskurve.
b) und c) Hyperbolisches Paraboloid, Grund der Namensgebung: b) die Hyperbeln
sind die Schnitte mit Ebenen \(z=k\), c) die Parabeln
sind die Schnitte mit den Ebenen \(x=k\) oder \(y=k\).
a) b) c) |
||||||||
|
|||||||